On-device deployment of YOLOv8 object detection
This document is based on the Qualcomm Quick AI Application Builder (QAI AppBuilder) tool, the wxWidgets library, and the YOLOv8 model to develop an application that captures camera streams, recognizes content, and displays it on screen.
Environment preparation
Run the following commands:
sudo apt update -y
sudo apt install -y g++ make pkg-config wx3.2-headers libwxgtk3.2-dev
sudo apt install -y libopencv-core-dev libopencv-calib3d-dev libopencv-dnn-dev
sudo apt install -y libopencv-objdetect-dev libopencv-photo-dev libopencv-stitching-dev
sudo apt install -y libopencv-video-dev libgstreamer-plugins-base1.0-dev
Download the QAI AppBuilder tool and decompress it to your user directory.
# Click the link above to download the compressed file ai-engine-direct-helper.tar and place it in ~/ai-engine-direct-helper.tar directory
# Decompress
cd ~
tar -xvf ai-engine-direct-helper.tar
Edit ai-engine-direct-helper/src/LibAppBuilder.cpp and remove the empty main function (this source file will be used during subsequent compilation, but the main function here is not needed).
Download the QAIRT tool and decompress it to your user directory.
# Click the link above to download the compressed file v2.37.1.250807.zip and place it in ~/v2.37.1.250807.zip directory
# Decompress
cd ~
unzip v2.37.1.250807.zip
Write code
Create a file named main.cpp with the following content:
#include "LibAppBuilder.hpp"
#include <iostream>
#include <filesystem>
#include <string>
#include <vector>
#include <cstddef>
#include <opencv2/opencv.hpp>
#include <opencv2/core/utils/logger.hpp>
#include <algorithm>
#include <map>
#include <thread>
#include <wx/rawbmp.h>
#include <gst/video/video-info.h>
#include <wx/log.h>
#include <wx/wx.h>
#include <gst/gst.h>
#include <gst/app/gstappsink.h>
#include <wx/dcclient.h>
#include <wx/thread.h>
#include <chrono>
#include <atomic>
namespace fs = std::filesystem;
const std::string MODEL_NAME = "yolov8_det";
const int IMAGE_SIZE = 640;
unsigned long frameCounter = 0;
// Class mapping for YOLOv8
std::map<int, std::string> class_map = {
{0, "person"},
{1, "bicycle"},
{2, "car"},
{3, "motorcycle"},
{4, "airplane"},
{5, "bus"},
{6, "train"},
{7, "truck"},
{8, "boat"},
{9, "traffic light"},
{10, "fire hydrant"},
{11, "stop sign"},
{12, "parking meter"},
{13, "bench"},
{14, "bird"},
{15, "cat"},
{16, "dog"},
{17, "horse"},
{18, "sheep"},
{19, "cow"},
{20, "elephant"},
{21, "bear"},
{22, "zebra"},
{23, "giraffe"},
{24, "backpack"},
{25, "umbrella"},
{26, "handbag"},
{27, "tie"},
{28, "suitcase"},
{29, "frisbee"},
{30, "skis"},
{31, "snowboard"},
{32, "sports ball"},
{33, "kite"},
{34, "baseball bat"},
{35, "baseball glove"},
{36, "skateboard"},
{37, "surfboard"},
{38, "tennis racket"},
{39, "bottle"},
{40, "wine glass"},
{41, "cup"},
{42, "fork"},
{43, "knife"},
{44, "spoon"},
{45, "bowl"},
{46, "banana"},
{47, "apple"},
{48, "sandwich"},
{49, "orange"},
{50, "broccoli"},
{51, "carrot"},
{52, "hot dog"},
{53, "pizza"},
{54, "donut"},
{55, "cake"},
{56, "chair"},
{57, "couch"},
{58, "potted plant"},
{59, "bed"},
{60, "dining table"},
{61, "toilet"},
{62, "tv"},
{63, "laptop"},
{64, "mouse"},
{65, "remote"},
{66, "keyboard"},
{67, "cell phone"},
{68, "microwave"},
{69, "oven"},
{70, "toaster"},
{71, "sink"},
{72, "refrigerator"},
{73, "book"},
{74, "clock"},
{75, "vase"},
{76, "scissors"},
{77, "teddy bear"},
{78, "hair drier"},
{79, "toothbrush"}
};
struct Detection {
float x1, y1, x2, y2;
float score;
int class_id;
};
float calculateIoU(const Detection& box1, const Detection& box2) {
float inter_x1 = std::max(box1.x1, box2.x1);
float inter_y1 = std::max(box1.y1, box2.y1);
float inter_x2 = std::min(box1.x2, box2.x2);
float inter_y2 = std::min(box1.y2, box2.y2);
float inter_area = std::max(0.0f, inter_x2 - inter_x1) * std::max(0.0f, inter_y2 - inter_y1);
float box1_area = (box1.x2 - box1.x1) * (box1.y2 - box1.y1);
float box2_area = (box2.x2 - box2.x1) * (box2.y2 - box2.y1);
return inter_area / (box1_area + box2_area - inter_area);
}
std::vector<Detection> nonMaximumSuppression(const std::vector<Detection>& detections,
float score_threshold = 0.45,
float iou_threshold = 0.7) {
std::vector<Detection> filtered_detections;
std::vector<Detection> candidates;
// Filter by score threshold
for (const auto& det : detections) {
if (det.score >= score_threshold) {
candidates.push_back(det);
}
}
// Sort by score in descending order
std::sort(candidates.begin(), candidates.end(),
[](const Detection& a, const Detection& b) { return a.score > b.score; });
// NMS
while (!candidates.empty()) {
// Take the highest scoring detection
Detection best_det = candidates[0];
filtered_detections.push_back(best_det);
candidates.erase(candidates.begin());
// Remove overlapping detections
for (auto it = candidates.begin(); it != candidates.end();) {
if (calculateIoU(best_det, *it) > iou_threshold) {
it = candidates.erase(it);
} else {
++it;
}
}
}
return filtered_detections;
}
void drawBoxOnImage(cv::Mat& image, const Detection& det,
float scale_x = 1.0f, float scale_y = 1.0f) {
// Scale coordinates back to original image size
int x1 = static_cast<int>(det.x1 * scale_x);
int y1 = static_cast<int>(det.y1 * scale_y);
int x2 = static_cast<int>(det.x2 * scale_x);
int y2 = static_cast<int>(det.y2 * scale_y);
// Clamp coordinates to image boundaries
x1 = std::max(0, std::min(image.cols - 1, x1));
y1 = std::max(0, std::min(image.rows - 1, y1));
x2 = std::max(0, std::min(image.cols - 1, x2));
y2 = std::max(0, std::min(image.rows - 1, y2));
if (x1 >= x2 || y1 >= y2) return; // Skip invalid boxes
// Draw rectangle (BGR color: green)
cv::rectangle(image, cv::Point(x1, y1), cv::Point(x2, y2), cv::Scalar(0, 255, 0), 2);
// Create label text
std::string label = class_map[det.class_id] + " " + std::to_string(det.score).substr(0, 4);
// Draw label background
int baseline = 0;
cv::Size text_size = cv::getTextSize(label, cv::FONT_HERSHEY_SIMPLEX, 0.5, 2, &baseline);
cv::rectangle(image, cv::Point(x1, y1 - text_size.height - baseline),
cv::Point(x1 + text_size.width, y1), cv::Scalar(0, 255, 0), cv::FILLED);
// Draw label text
cv::putText(image, label, cv::Point(x1, y1 - baseline),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0), 2);
}
class YOLOv8Detector {
private:
LibAppBuilder libAppBuilder;
bool initialized = false;
public:
YOLOv8Detector() = default;
~YOLOv8Detector() {
if (initialized) {
libAppBuilder.ModelDestroy(MODEL_NAME);
}
}
bool Initialize() {
// Get current working directory
fs::path execution_ws = fs::current_path();
fs::path backend_lib_path = execution_ws / "libQnnHtp.so";
fs::path system_lib_path = execution_ws / "libQnnSystem.so";
fs::path model_path = execution_ws / (MODEL_NAME + ".bin");
// Disable OpenCV logging
cv::utils::logging::setLogLevel(cv::utils::logging::LOG_LEVEL_ERROR);
SetLogLevel(1);
SetProfilingLevel(1); // ProfilingLevel::BASIC
std::cout << "Initializing YOLOv8 model..." << std::endl;
int ret = libAppBuilder.ModelInitialize(MODEL_NAME, model_path.string(),
backend_lib_path.string(), system_lib_path.string());
if (ret < 0) {
std::cout << "Failed to initialize YOLOv8 model" << std::endl;
return false;
}
initialized = true;
std::cout << "YOLOv8 model initialized successfully" << std::endl;
return true;
}
std::vector<Detection> Detect(cv::Mat& image) {
if (!initialized) return {};
frameCounter++;
// Save original dimensions for scaling
int orig_height = image.rows;
int orig_width = image.cols;
float scale_x = static_cast<float>(orig_width) / IMAGE_SIZE;
float scale_y = static_cast<float>(orig_height) / IMAGE_SIZE;
// Resize image to model input size
cv::Mat resized_image;
cv::resize(image, resized_image, cv::Size(IMAGE_SIZE, IMAGE_SIZE),
0, 0, cv::INTER_LINEAR);
// Convert BGR to RGB and normalize to [0, 1]
cv::Mat rgb_image;
cv::cvtColor(resized_image, rgb_image, cv::COLOR_BGR2RGB);
cv::Mat float_image;
rgb_image.convertTo(float_image, CV_32FC3, 1.0 / 255.0);
// Prepare input tensor (NHWC format)
std::vector<float> input_data(IMAGE_SIZE * IMAGE_SIZE * 3);
memcpy(input_data.data(), float_image.data, input_data.size() * sizeof(float));
// Set performance profile
SetPerfProfileGlobal("burst");
// Prepare input/output buffers
std::vector<uint8_t*> inputBuffers;
std::vector<uint8_t*> outputBuffers;
std::vector<size_t> outputSize;
inputBuffers.push_back(reinterpret_cast<uint8_t*>(input_data.data()));
// Perform inference
std::string perfProfile = "burst";
int ret = libAppBuilder.ModelInference(MODEL_NAME, inputBuffers, outputBuffers,
outputSize, perfProfile);
// Release performance profile
RelPerfProfileGlobal();
if (ret < 0) {
std::cout << "Inference failed" << std::endl;
return {};
}
// Parse output tensors
if (outputBuffers.size() < 3) {
std::cout << "Unexpected number of output buffers: " << outputBuffers.size() << std::endl;
return {};
}
// Get output data
float* scores_data = reinterpret_cast<float*>(outputBuffers[0]);
float* class_ids_data = reinterpret_cast<float*>(outputBuffers[1]);
float* boxes_data = reinterpret_cast<float*>(outputBuffers[2]);
// Assuming output shape is [1, 8400, ...]
const int num_predictions = 8400;
// Collect all detections
std::vector<Detection> all_detections;
for (int i = 0; i < num_predictions; i++) {
Detection det;
det.score = scores_data[i];
det.class_id = static_cast<int>(class_ids_data[i]);
// Box coordinates: [x1, y1, x2, y2]
det.x1 = boxes_data[i * 4];
det.y1 = boxes_data[i * 4 + 1];
det.x2 = boxes_data[i * 4 + 2];
det.y2 = boxes_data[i * 4 + 3];
// Scale back to original image coordinates
det.x1 *= scale_x;
det.y1 *= scale_y;
det.x2 *= scale_x;
det.y2 *= scale_y;
all_detections.push_back(det);
}
// Apply NMS
std::vector<Detection> filtered_detections = nonMaximumSuppression(all_detections);
// Free output buffers
for (auto buffer : outputBuffers) {
free(buffer);
}
return filtered_detections;
}
};
class CameraFrame : public wxFrame
{
public:
CameraFrame(const wxString& title);
~CameraFrame();
private:
wxMutex m_imageMutex;
wxImage m_frameImage;
GstElement *m_pipeline = nullptr;
GstElement *m_appsink = nullptr;
YOLOv8Detector m_detector;
bool InitGstPipeline();
static GstFlowReturn NewSampleCallback(GstAppSink *sink, gpointer user_data);
void ConvertGstBufferToWxImage(GstBuffer *buffer, GstCaps *caps);
void OnPaint(wxPaintEvent& event);
void OnClose(wxCloseEvent& event);
DECLARE_EVENT_TABLE()
};
class CameraApp : public wxApp
{
public:
virtual bool OnInit();
};
IMPLEMENT_APP(CameraApp)
BEGIN_EVENT_TABLE(CameraFrame, wxFrame)
EVT_PAINT(CameraFrame::OnPaint)
EVT_CLOSE(CameraFrame::OnClose)
END_EVENT_TABLE()
bool CameraApp::OnInit()
{
gst_init(nullptr, nullptr);
CameraFrame *frame = new CameraFrame(wxT("YOLOv8 Real-time Detection (640x480)"));
frame->Show(true);
return true;
}
CameraFrame::CameraFrame(const wxString& title)
: wxFrame(nullptr, wxID_ANY, title, wxDefaultPosition, wxSize(640, 480))
{
// Initialize detector
if (!m_detector.Initialize()) {
wxLogError("Failed to initialize YOLOv8 detector");
Close();
return;
}
// Initialize pipeline and start
if (InitGstPipeline()) {
gst_element_set_state(m_pipeline, GST_STATE_PLAYING);
//wxLogMessage("GStreamer pipeline started successfully");
} else {
wxLogError("Failed to init GStreamer pipeline");
Close();
}
}
CameraFrame::~CameraFrame()
{
if (m_pipeline) {
gst_element_set_state(m_pipeline, GST_STATE_NULL);
gst_object_unref(m_pipeline);
}
gst_deinit();
}
static void OnBusError(GstBus* bus, GstMessage* msg, gpointer data)
{
GError* err = nullptr;
gchar* debug_info = nullptr;
gst_message_parse_error(msg, &err, &debug_info);
wxLogError("GStreamer error: %s", err ? err->message : "Unknown error");
g_error_free(err);
g_free(debug_info);
}
bool CameraFrame::InitGstPipeline()
{
const gchar *pipelineDesc = "qtiqmmfsrc name=camsrc ! "
"video/x-raw,format=NV12,width=640,height=480,framerate=30/1 ! "
"videoconvert ! "
"video/x-raw,format=BGR ! "
"appsink name=appsink sync=false max-buffers=1 drop=true";
// Create pipeline
m_pipeline = gst_parse_launch(pipelineDesc, nullptr);
if (!m_pipeline) return false;
GstBus* bus = gst_pipeline_get_bus(GST_PIPELINE(m_pipeline));
gst_bus_add_signal_watch(bus);
g_signal_connect(bus, "message::error", G_CALLBACK(OnBusError), this);
gst_object_unref(bus);
// Get appsink element
m_appsink = gst_bin_get_by_name(GST_BIN(m_pipeline), "appsink");
if (!m_appsink) return false;
// Configure appsink
gst_app_sink_set_emit_signals(GST_APP_SINK(m_appsink), TRUE);
gst_app_sink_set_drop(GST_APP_SINK(m_appsink), TRUE);
gst_app_sink_set_max_buffers(GST_APP_SINK(m_appsink), 1);
GstAppSinkCallbacks callbacks = {nullptr, nullptr, NewSampleCallback, nullptr, nullptr, nullptr};
gst_app_sink_set_callbacks(GST_APP_SINK(m_appsink), &callbacks, this, nullptr);
return true;
}
GstFlowReturn CameraFrame::NewSampleCallback(GstAppSink *sink, gpointer user_data)
{
CameraFrame *frame = static_cast<CameraFrame*>(user_data);
GstSample *sample = gst_app_sink_pull_sample(sink);
if (!sample) return GST_FLOW_ERROR;
GstBuffer *buffer = gst_sample_get_buffer(sample);
GstCaps *caps = gst_sample_get_caps(sample);
if (buffer && caps) {
frame->ConvertGstBufferToWxImage(buffer, caps);
frame->Refresh();
}
gst_sample_unref(sample);
return GST_FLOW_OK;
}
void CameraFrame::ConvertGstBufferToWxImage(GstBuffer *buffer, GstCaps *caps)
{
GstVideoInfo info;
if (!gst_video_info_from_caps(&info, caps)) {
wxLogWarning("Failed to get video info from caps");
return;
}
// Validate video dimensions
if (info.width <= 0 || info.height <= 0) {
wxLogWarning("Invalid video dimensions: %dx%d", info.width, info.height);
return;
}
GstMapInfo map;
if (!gst_buffer_map(buffer, &map, GST_MAP_READ)) {
wxLogWarning("Failed to map GST buffer");
return;
}
// Validate data size (RGB format should be width×height×3)
size_t expectedSize = info.width * info.height * 3;
if (map.size < expectedSize) {
wxLogWarning("Buffer size mismatch: expected %zu, got %zu", expectedSize, map.size);
gst_buffer_unmap(buffer, &map);
return;
}
// Convert GST buffer to cv::Mat for detection
cv::Mat frame(info.height, info.width, CV_8UC3, map.data);
// Perform detection
auto detections = m_detector.Detect(frame);
// Draw detections on frame
for (const auto& det : detections) {
drawBoxOnImage(frame, det);
}
// Convert BGR to RGB for wxImage
cv::cvtColor(frame, frame, cv::COLOR_BGR2RGB);
wxMutexLocker locker(m_imageMutex);
m_frameImage = wxImage(info.width, info.height, frame.data, true).Copy();
gst_buffer_unmap(buffer, &map);
}
void CameraFrame::OnPaint(wxPaintEvent& event)
{
wxPaintDC dc(this);
wxMutexLocker locker(m_imageMutex);
if (!m_frameImage.IsOk() || m_frameImage.GetWidth() <= 0 || m_frameImage.GetHeight() <= 0) {
// Draw default background
dc.SetBackground(wxBrush(wxColour(50, 50, 50)));
dc.Clear();
// Draw status text
dc.SetTextForeground(wxColour(255, 255, 255));
dc.DrawText(wxT("Waiting for camera feed..."), wxPoint(20, 20));
return;
}
// Draw image, scaled to window size
wxSize clientSize = GetClientSize();
if (clientSize.GetWidth() <= 0 || clientSize.GetHeight() <= 0)
return;
wxBitmap bmp(m_frameImage.Scale(clientSize.GetWidth(), clientSize.GetHeight(), wxIMAGE_QUALITY_BILINEAR));
dc.DrawBitmap(bmp, 0, 0, false);
}
void CameraFrame::OnClose(wxCloseEvent& event)
{
Destroy();
}
Create a Makefile
Create a Makefile with the following content:
SRCS += main.cpp
SRCS += $(wildcard ~/ai-engine-direct-helper/src/*.cpp)
SRCS += $(wildcard ~/ai-engine-direct-helper/src/Log/*.cpp)
SRCS += $(wildcard ~/ai-engine-direct-helper/src/PAL/src/linux/*.cpp)
SRCS += $(wildcard ~/ai-engine-direct-helper/src/Utils/*.cpp)
SRCS += $(wildcard ~/ai-engine-direct-helper/src/WrapperUtils/*.cpp)
SRCS += $(wildcard ~/ai-engine-direct-helper/src/PAL/src/common/*.cpp)
OBJS = $(patsubst %cpp, %o, $(SRCS))
DEPS = $(patsubst %cpp, %d, $(SRCS))
CXXFLAGS += -I/usr/include/opencv4
CXXFLAGS += -I/usr/include/wx-3.2
CXXFLAGS += -I ~/qairt/2.37.1.250807/include/QNN
CXXFLAGS += -I ~/ai-engine-direct-helper/src
CXXFLAGS += -I ~/ai-engine-direct-helper/src/Utils
CXXFLAGS += -I ~/ai-engine-direct-helper/src/WrapperUtils
CXXFLAGS += -I ~/ai-engine-direct-helper/src/Log
CXXFLAGS += -I ~/ai-engine-direct-helper/src/PAL/include
CXXFLAGS += -I/usr/include/torch/csrc/api/include
LDFLAGS += -lopencv_core -lopencv_highgui -lopencv_imgcodecs -lopencv_imgproc -lopencv_videoio
CXXFLAGS += `wx-config --cxxflags` `pkg-config --cflags gstreamer-1.0 gstreamer-app-1.0 gstreamer-video-1.0` -Wall -g
LDFLAGS += `wx-config --libs` `pkg-config --libs gstreamer-1.0 gstreamer-app-1.0 gstreamer-video-1.0`
TARGET = wx_yolo8
all: $(TARGET)
%.o: %.cpp
g++ -c -g -MMD $(CXXFLAGS) $< -o $@
$(TARGET): ${OBJS}
g++ -o $@ $^ ${LDFLAGS}
sinclude $(DEPS)
.PHONY: clean
clean:
$(RM) $(TARGET) ${OBJS} ${DEPS}
Compile program
Execute the command make to compile the program and obtain the executable file wx_yolo8.
Get model file
When running Qualcomm Model Demo for the YOLOv8-det example, the model file will be downloaded to yolov8_det/models/yolov8_det. You may also click here to download the model file.
Get runtime library files
Please obtain the following runtime library files from the decompressed v2.37.1.250807 directory.
libQnnHtp.so
libQnnHtpV68Skel.so
libQnnHtpV68Stub.so
libQnnSystem.so
Run program
Run the following commands:
FILE_PATH=$(sudo find /run/user/1001 -type f -name '.mutter-*' | head -n 1)
sudo XAUTHORITY="$FILE_PATH" \
LD_LIBRARY_PATH=lib:$LD_LIBRARY_PATH \
GST_PLUGIN_PATH=/usr/lib/gstreamer-1.0:$GST_PLUGIN_PATH \
DISPLAY=:0 ./wx_yolo8
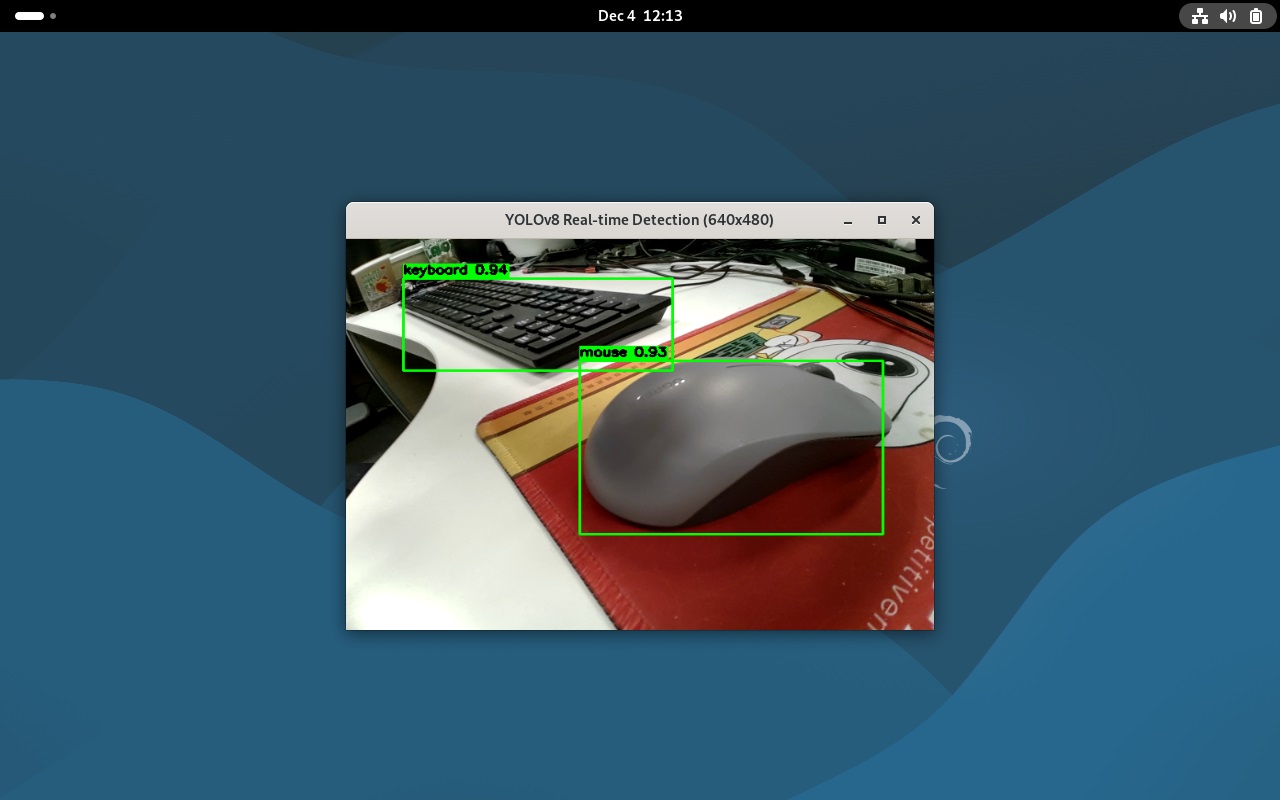
Runtime Result
Quick deployment verification
The compiled program and all required runtime files have been packaged into yolov8-det-deploy.tar.gz, allowing for quick deployment and verification.
tar xvf yolov8-det-deploy.tar.gz
#Starting the camera requires root privileges; simply enter the sudo password as prompted.
cd yolo-deploy
./run.sh