跌倒警报设备
该应用是一个基于 Quectel Pi H1 智能主控板,通过USB摄像头进行实时人体姿态识别,采用YOLOv8-Pose和多人跌倒分类器,自动检测用户是否发生跌倒事件的智能应用。
该项目通过调用摄像头实时采集画面,当检测到跌倒事件时会启动本地报警器并发送通知到手机,用户在手机端通过apk查看跌倒图片,可作为老年人/患者安全监护、跌倒预警系统的参考示例。
开发资源汇总
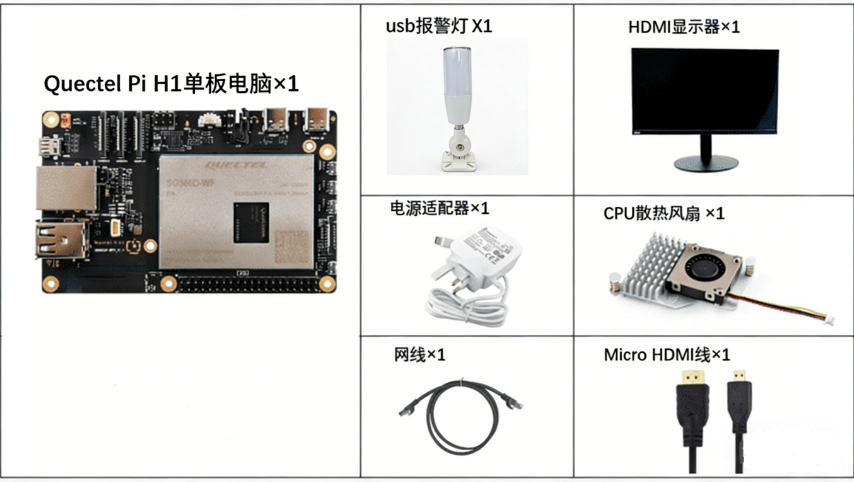
开发配件清单
| 配件名称 | 数量 | 规格参数 |
|---|---|---|
| Quectel Pi H1 智能主控板 | 1块 | Quectel Pi H1智能生态开发板 |
| USB摄像头 | 1个 | 推荐分辨率:1280×720或更高;输出格式:MJPG/YUYV |
| USB-C 电源线充电器 | 1个 | 27W USB Type-C接口充电器 1.2米线长中规电源PD电源 适用于树莓派5代 |
| USB-C DP 显示线 /Micro HDMI 线 | 1根 | 规格:DP 1.4;线长:1m;接口:USB-C(公头)- USB-C(公头) 规格:Micro HDMI 2.0;线长:1m;接口:HDMI-A(公头)-HDMI-D(公头) |
| CPU 散热风扇(可选) | 1个 | 树莓派5代官方原装散热器带导热贴 |
| 显示屏 | 1个 | 24英寸HDMI显示器 |
| USB可编程警报灯(可选) | 1个 | 通过串口(/dev/ttyUSB0)控制的LED警报灯 |
配件实物参考
Quectel套件
快速上手
开发准备
Quectel Pi H1智能主控板出厂默认搭载 Debian 13 系统镜像,因此无需再次烧录镜像,仅需按照如下步骤操作即可。
硬件连接
显示连接
将 Micro HDMI 线一端接入智能主控板的 Micro HDMI 接口,另一端接入显示器的 HDMI 接口。
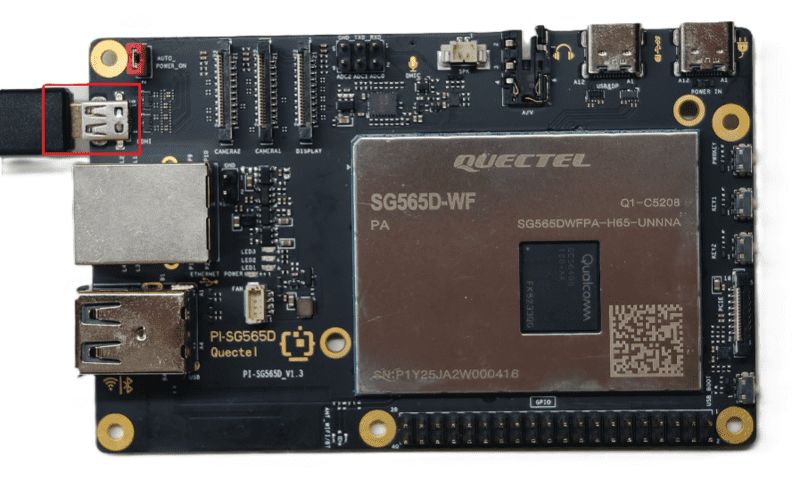
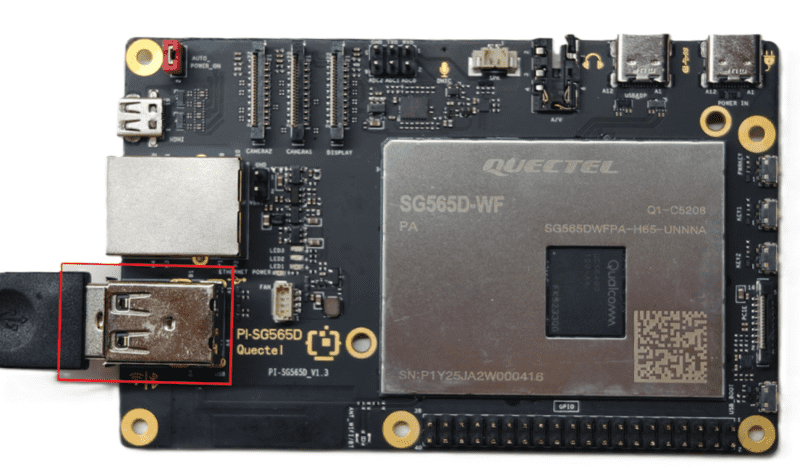
输入设备连接
将 USB 键盘、鼠标接入智能主控板的两个 USB-A 接口上,若用无线输入设备,将接收器插入 USB 口即可。
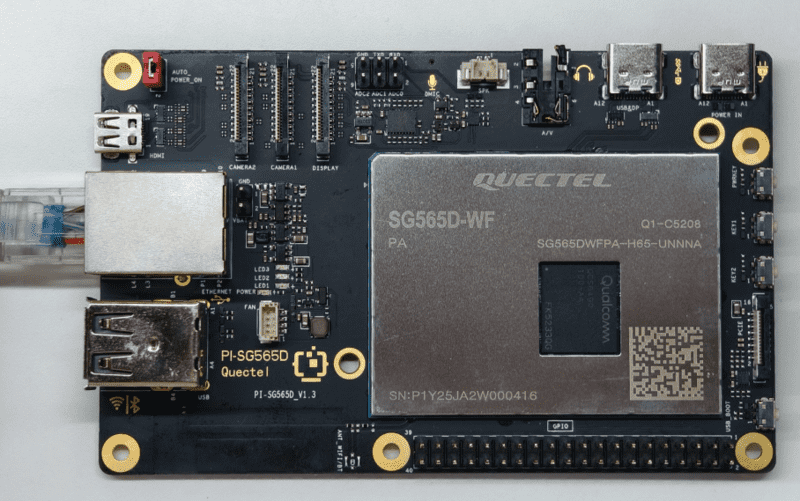
网线连接
将网线一端接入智能主控板的千兆网口,另一端接入路由器的网口(确保路由器已联网)。
USB警报灯连接(可选)
使用USB 线将警报灯与智能主控板的空闲USB接口连接(可根据购买的警报器的文档操作)
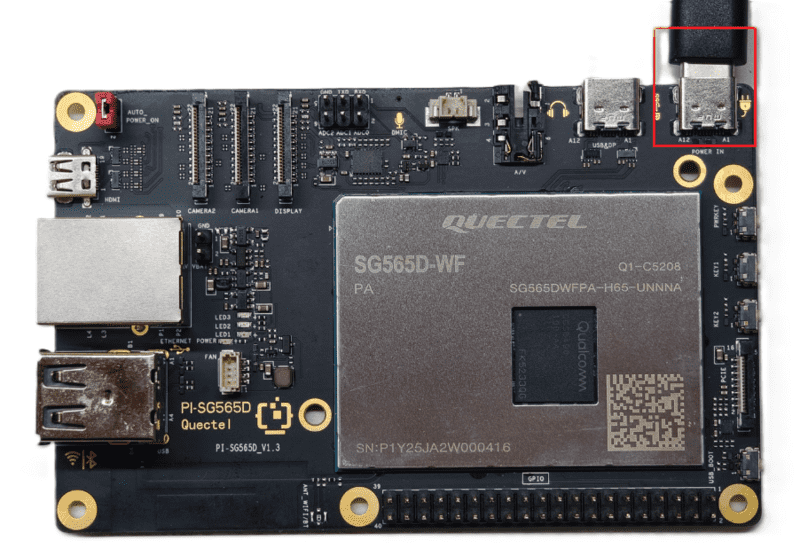
电源连接
将 USB-A 电源线的 USB-A 端接入电源适配器,USB-C 端接入智能主控板的电源口(通常标注POWER IN)。
项目实现
安装前置
确认有网络连接后,打开终端输入命令:
sudo apt update && sudo apt install -y python3-pip libatlas-base-dev libjasper-dev
上述命令将更新软件源并安装项目运行所需的一些库,具体包括:
- libatlas-base-dev 和 libjasper-dev:支持科学计算库的依赖;
- python3-pip:Python 包管理器,用于安装项目依赖。
获取代码
代码解压到设备
安装 Python 依赖
pip install -r requirements.txt
依赖包说明:
- PySide6:Qt6 的 Python 绑定,用于构建图形用户界面;
- opencv-python:OpenCV 图像处理库,用于摄像头采集和图像处理;
- ultralytics:YOLOv8 目标检测框架,用于人体关键点检测;
- numpy:数值计算库,用于矩阵运算和特征提取;
- scikit-learn:机器学习库,用于提供随机森林分类器;
- joblib:序列化库,用于加载预训练模型。
准备模型文件
跌倒检测应用需要预加载以下模型文件,请放置在 model/ 目录下:
- yolov8n-pose.pt - YOLOv8-Nano Pose 模型,用于检测人体17个关键点
- fall_multi_person_model.pkl - 随机森林分类器,用于判断是否跌倒
- feature_scaler_multi.pkl - 特征缩放器,用于标准化输入特征
这些模型文件可以从以下方式获取:
- yolov8n-pose.pt:从 Ultralytics 官方 GitHub 下载或通过代码自动下载
- fall_multi_person_model.pkl 和 feature_scaler_multi.pkl 已放置model目录下
运行应用
完成模型准备后,运行主程序:
cd src
python3 main.py
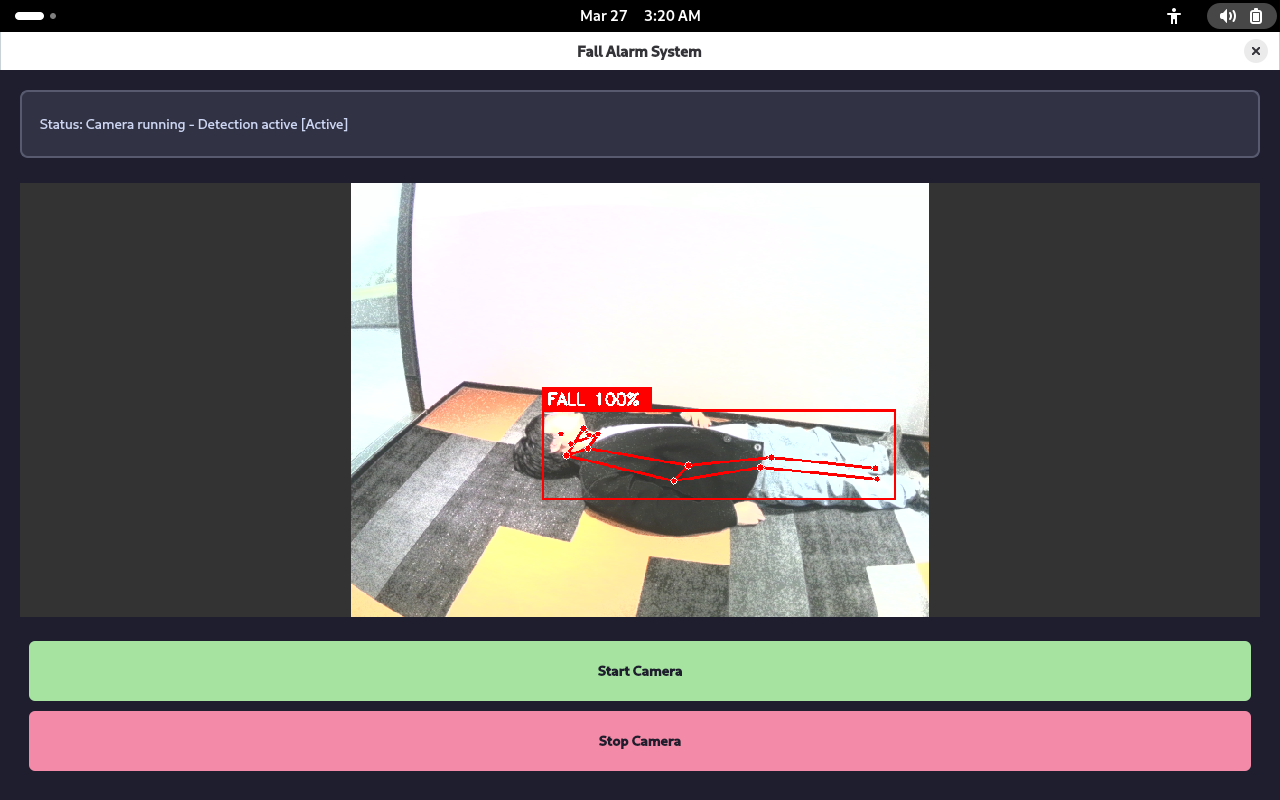
程序启动后将显示图形界面,提供以下功能:
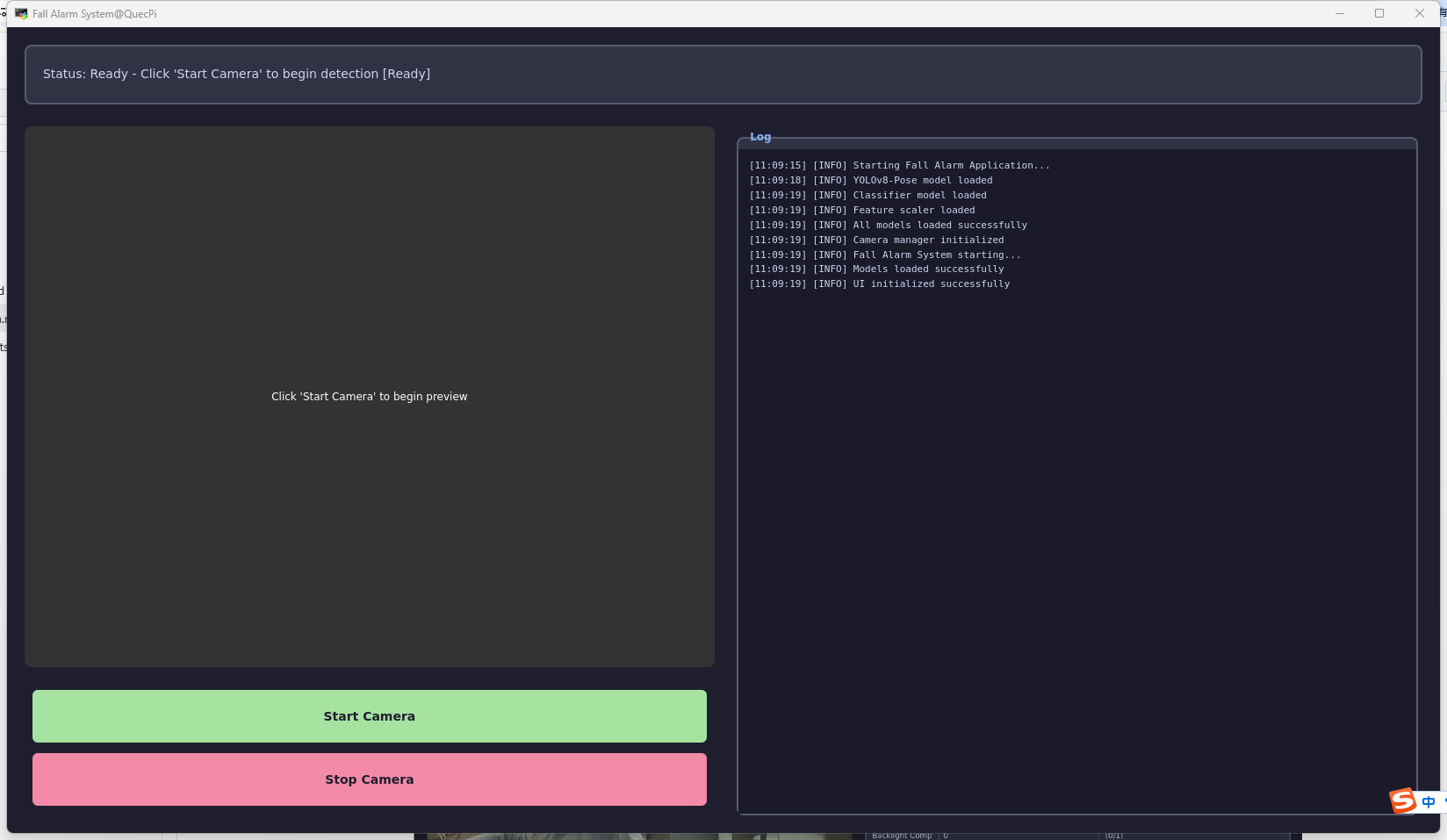
功能界面说明
| 界面区域 | 功能说明 |
|---|---|
| 摄像头预览区域 | 实时显示摄像头采集的画面,标注检测到的人体和跌倒状态 |
| 日志输出区域 | 显示应用运行过程中的实时日志和检测信息 |
| 跌倒警报提示 | 在顶部显示跌倒检测结果,自动触发警报灯并保存报警图片 |
| 相机选择 | 支持多个USB摄像头,可自动检测并选择可用摄像头 |
日志显示区域
右侧区域可输出应用运行过程中的日志信息,包括:
- 模型加载日志:显示是否成功加载YOLOv8模型和分类器
- 检测日志:显示检测到的人体数量和跌倒状态
- 警报日志:显示跌倒警报和图片上传状态
实时检测参数
程序使用以下参数进行跌倒检测(可根据实际需求调整):
| 参数 | 说明 | 默认值 |
|---|---|---|
| MIN_CONFIDENCE | 关键点置信度阈值 | 0.4 |
| MIN_KEYPOINTS | 有效关键点最少数量 | 10 |
| FALL_BODY_ANGLE_THRESHOLD | 身体倾角阈值 | 55° |
| FALL_HEIGHT_RATIO_THRESHOLD | 身体高宽比阈值 | 1.2 |
| FALL_MIN_CONFIDENCE | 分类器置信度阈值 | 0.75 |
| FALL_CONFIRM_FRAMES | 跌倒确认帧数 | 3 |
| DETECT_INTERVAL | 检测间隔(秒) | 0.15 |
跌倒检测原理
关键点检测
应用使用YOLOv8-Pose模型检测人体17个关键点:
0: 鼻子 1: 左眼 2: 右眼 3: 左耳 4: 右耳
5: 左肩 6: 右肩 7: 左肘 8: 右肘 9: 左手腕
10: 右手腕 11: 左髋 12: 右髋 13: 左膝 14: 右膝
15: 左脚踝 16: 右脚踝
特征提取
从关键点提取以下特征用于分类:
- 关键点坐标:17个关键点的(x, y)坐标和置信度,共51维
- 身体角度:计算8个关键点之间的角度特征,共8维
- 相对坐标:相对于髋部中心点的相对坐标,共26维
- 身体形态:身体高度、宽度及高宽比,共3维
跌倒判断逻辑
应用使用多种方法判断是否发生跌倒:
# 特征提取和分类
features = detector.extract_features(keypoints, confidences)
if scaler is available:
features_scaled = scaler.transform(features)
else:
features_scaled = features
# 获取分类器预测
probabilities = classifier.predict_proba(features_scaled)
is_falling = probabilities[0, 1] > FALL_MIN_CONFIDENCE # 类别1表示跌倒
# 确认帧计数(减少误报)
if is_falling:
fall_count += 1
if fall_count >= FALL_CONFIRM_FRAMES:
trigger_alarm()
判断标准:
- 随机森林分类器概率 > 0.75 且连续3帧检测到跌倒
- 或者同时满足身体角度 > 55° 且身体高宽比 > 1.2
警报和查看
当检测到跌倒时,应用会:
- 启动警报灯:通过串口向警报灯设备发送闪光和报警命令
- 保存报警图片:在
picture/目录保存包含时间戳的JPEG图片 - 上传服务器:将报警图片上传到指定服务器地址
- 上传地址:
http://SERVER_IP:8000/upload_fall(可自行替换服务器地址和上传接口) - 支持后台异步上传,不阻断主程序运行
- 上传地址:
- APK端查看:可通过apk端实时接收跌倒通知,并查看报警图片
应用演示
常见问题及解决方案
模型加载相关问题
模型文件找不到
现象:
ERROR - Pose model not found: /path/to/model/yolov8n-pose.pt
ERROR - Classifier model not found: /path/to/model/fall_multi_person_model.pkl
解决方案:
- 确保
yolov8n-pose.pt、fall_multi_person_model.pkl、feature_scaler_multi.pkl都放在model/目录下 - 检查文件路径是否正确,使用绝对路径测试
- 第一次运行可以让程序自动下载YOLOv8模型(需要网络连接)
摄像头相关问题
摄像头无法识别
现象:
Warning: No available cameras detected
解决方案:
检查摄像头是否正确连接到USB接口
使用命令检查摄像头是否被识别:
# Linux ls -la /dev/video* # 使用v4l2-ctl列出摄像头 v4l2-ctl --list-devices尝试使用其他USB接口
如果还是不行,使用USB集线器并连接电源
检查是否需要安装摄像头驱动程序
摄像头画面卡顿或延迟大
现象:
检测到画面延迟超过1秒,或摄像头预览画面不流畅
原因分析:
- 摄像头分辨率过高导致处理延迟
- CPU占用率过高
- 网络上传导致主线程阻塞
解决方案:
- 降低摄像头分辨率(改为1280×720而非更高)
- 调整
DETECT_INTERVAL参数增加检测间隔:DETECT_INTERVAL = 0.25 # 从0.15增加到0.25秒 - 降低
YOLO_IMG_SIZE以加快推理速度:YOLO_IMG_SIZE = 320 # 可降低到256 - 禁用服务器上传功能进行本地测试
跌倒检测相关问题
误报率高(误检测正常动作为跌倒)
现象:
用户正在弯腰、坐下或躺着休息时被误检为跌倒
解决方案:
调整分类器置信度阈值:提高阈值可减少误报
FALL_MIN_CONFIDENCE = 0.80 # 从0.75增加到0.80增加确认帧数:只有连续多帧检测到才判断为跌倒
FALL_CONFIRM_FRAMES = 5 # 从3增加到5优化角度和比例阈值:
FALL_BODY_ANGLE_THRESHOLD = 65 # 增加角度阈值 FALL_HEIGHT_RATIO_THRESHOLD = 1.4 # 增加高宽比阈值重新训练分类器:使用更多多样化的训练数据
- 增加坐下、弯腰等动作的负样本
- 确保跌倒样本的多样性(不同角度、速度、人物)
- 增加训练数据集大小
漏检率高(没有检测到实际跌倒)
现象:
实际发生跌倒时没有进行警报
解决方案:
降低分类器置信度阈值:
FALL_MIN_CONFIDENCE = 0.65 # 从0.75降低到0.65降低确认帧数:
FALL_CONFIRM_FRAMES = 2 # 从3降低到2检查关键点检测质量:
# 增加关键点需求或降低置信度阈值 MIN_CONFIDENCE = 0.3 # 从0.4降低 MIN_KEYPOINTS = 8 # 从10降低优化视角:确保摄像头能够看到整个身体
- 摄像头应该距离用户1-3米
- 摄像头安装高度应该在1.5-2米
- 避免侧面或接近垂直的视角
改善光照条件:
- 保证光线充足,避免阴影和逆光
- 使用均匀的环境光而非局部强光
警报和上传相关问题
警报灯无法启动
现象:
检测到跌倒但警报灯没有亮起
解决方案:
- 检查串口连接是否正确
- 验证警报灯设备是否正常工作
- 检查
light_control.py中的串口配置:port = '/dev/ttyUSB0' # 根据实际设备修改 baudrate = 9600 # 根据设备规格修改 - 检查串口权限:
sudo chmod 666 /dev/ttyUSB0 - 根据购买报警灯的文档进行调试,确保发送的命令格式正确
图片上传失败
现象:
ERROR - Upload failed: fall_20240326_143022.jpg
原因分析:
- 网络连接不稳定
- 服务器地址错误或服务器不可用
- 请求超时
解决方案:
- 检查网络连接:
ping SERVER_IP - 验证服务器是否运行:
curl http://SERVER_IP:8000/upload_fall - 检查防火墙设置是否允许出站连接
- 修改服务器地址:
SERVER_IP = "your.server.ip"
性能优化问题
CPU占用率过高
现象:
应用运行时CPU占用率 > 80%,系统响应缓慢
解决方案:
- 降低检测频率(增加
DETECT_INTERVAL) - 减小视频分辨率(改为640×480或更低)
- 禁用实时日志显示或降低日志更新频率
- 使用 GPU 加速(如果硬件支持)
内存泄漏导致占用率持续上升
现象:
应用运行数小时后内存占用从200MB增长到1GB
解决方案:
- 检查是否在循环中创建了未释放的对象
- 定期清空日志缓冲区:
if len(LogManager._logs) > 100: LogManager.clear_logs() - 确保线程正确关闭
- 使用内存分析工具检测泄漏:
python3 -m memory_profiler
技术支持与贡献
如在使用过程中遇到问题,欢迎在移远官方论坛 提交技术咨询,我们的技术支持团队将及时为您解答。
项目开源地址:https://github.com/Quectel-Pi/demo-fall-alarm-device
欢迎提交 Issue 反馈问题或 Pull Request 贡献代码改进!