

 English
EnglishQuecOpen® Quick Start Guide For FCM242D and FGM842D Series Modules
Introduction
Quectel FCM242D and FGM842D series modules support QuecOpen® solution. QuecOpen® is an embedded development platform based on RTOS system. It is intended to simplify the design and development of IoT applications.
This document is applicable to QuecOpen® solution based on SDK build environment. It is a quick start guide for FCM242D and FGM842D series modules. It outlines the SDK directory structure, compilation environment setup, application development and compilation, firmware flashing, and common compilation errors on Linux.
SDK Directory Structure
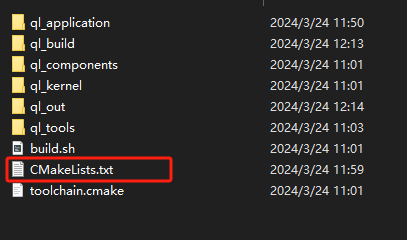
The directory structure of different QuecOpen SDK versions released by Quectel may vary slightly, whereas functions remain the same. An example of the QuecOpen SDK directory structure on Windows and Linux operating systems is shown in the following table.
| Directory Name | Description |
|---|---|
| ql_application | Stores sample files and the user application project code. |
| ql_build | Stores compilation-related script files. |
| ql_components | Stores components, including third-party components and Quectel API components. |
| ql_kernel | Stores chip-related code and code libraries, including support for RTOS (currently only FreeRTOS is supported). |
| ql_out | Stores files output after project compilation, used for flashing, such as .bin and .map files. |
| ql_tools | Stores the toolchain used for compilation. |
Project Compilation Environment Setup
gcc-arm-none-eabi, the GCC toolchain of the ARM bare-metal system, is the project compilation toolchain of the module. Linux and Windows operating systems are supported for the compilation. The gcc-arm-none-eabi toolchain, CMake and MinGW (MinGW is only needed for Windows operating system) are integrated in the ql_tools directory of the SDK, and they can be automatically decompressed for use. The recommended Linux distribution is Ubuntu 16.04 or above version, Windows 10 or above version. Additionally, you need to install Python 3 or above version and add it to the system environment variables.
When compiling your project, only the gcc-arm-none-eabi toolchain integrated in the SDK is supported, and the gcc-arm-none-eabi toolchain installed on the Linux operating system is not supported.
If the automatic decompression and installation of the gcc-arm-none-eabi toolchain in the SDK fails, you can manually decompress and install it as follows:
Open the Linux command terminal, execute the following command in ql_tools/toolchain directory to decompress the toolchain (If the toolchain has already been decompressed, skip this step):
tar -vxf gcc-arm-none-eabi-5_4-2016q3.tar.bz2
Execute the following command to open the environment variable configuration file:
sudo vim ~/.bashrc
Add the environment variable to the last line of the environment variable configuration file (add the actual file path on your system for the configuration file. The path in the figure below is for reference only):
export PATH=$PATH:/home/xxx/ql_tools/toolchain/gcc_arm_none_eabi/gcc-arm-none-eabi-5_4-2016q3/bin
Save and close the configuration file, then execute the following command in the Linux terminal window to apply the changes immediately. The environment variable is now set and the project compilation environment is ready:
source ~/.bashrc
Application Development
Create Application Directory
Create the required user folders (for storing source and header files) in the ql_application directory of QuecOpen SDK. For example, create user_code folder.
Create user_inc and user_src folders in the user_code folder to store header and source files respectively.
Application Demo Description
QuecOpen SDK provides reference application demos for application development in the ql_application/example directory in the SDK.
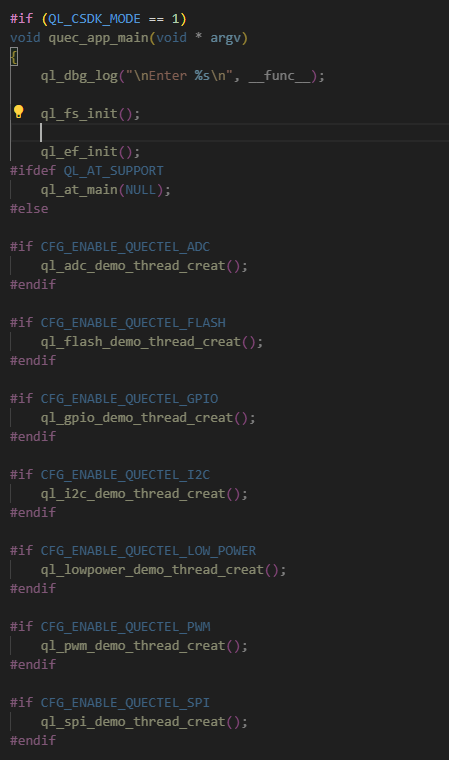
The application entry point, ql_app_main(), is in the ql_app_main.c file in the ql_application/ directory of the QuecOpen SDK. The demo programs can be called with ql_app_main() as needed, and you can refer to the following program logic to write your own code.
Add User Application
Create Application Thread
Create and write the user_code.c and user_code.h files, and store them in the user_code/user_src and user_code/user_inc directories respectively. An example of writing the user_code.c file is as follows:
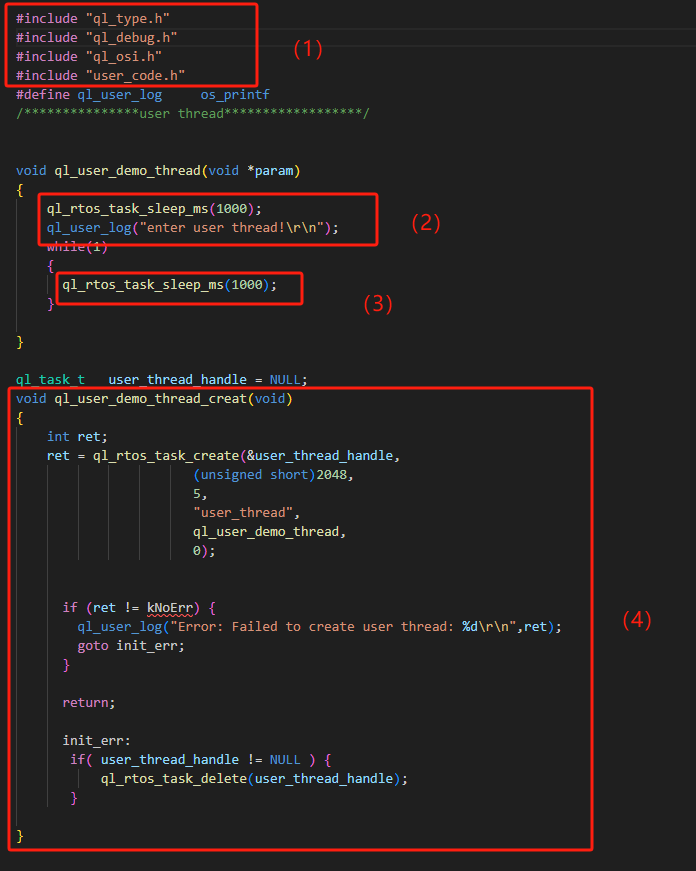
The following definitions apply to the serial numbers in the figure above:
- Add the user-defined header files
- Initialization configuration
- Task processing code
- Task creation function
Add
ql_user_demo_thread_creat()to theql_app_main()function to create a user task in the program.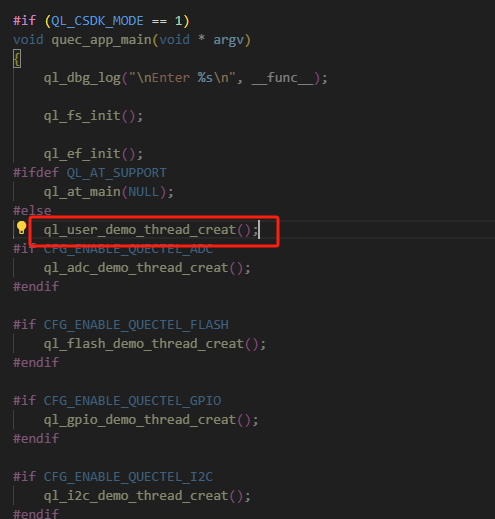
Add Compilation File
For successful compilation, the source files and header files must be added to the compilation script, otherwise these files will not be found during compilation. Follow these steps:
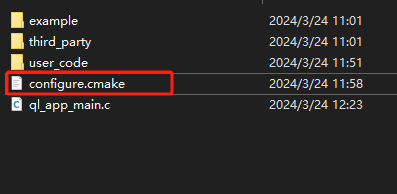
Enter the ql_application directory, and open the configure.cmake file.
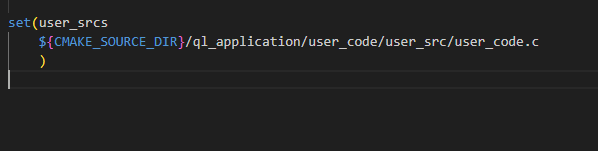
Add the following code to configure.cmake file to create a user_srcs list of source files.
Open the CMakeLists.txt file in the root directory of the SDK.
Find the line that reads
list (APPEND include_filesand add the path to the user’s header file. Find the line that readslist (APPEND source_filesand add the path to the user’s source file. Refer to the lines marked in red in the image below for guidance.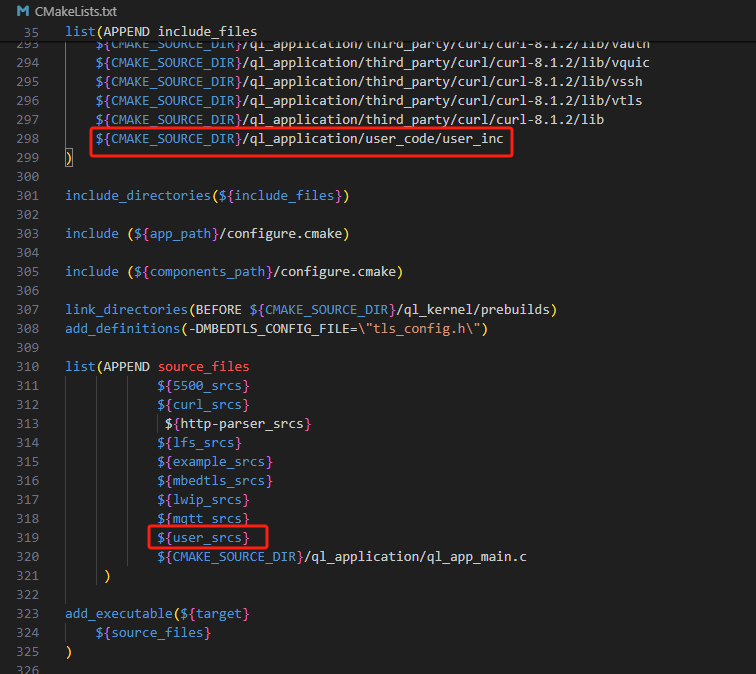
Application Compilation
This chapter explains application compilation using FCM242D module as an example.
Compilation Instructions
Linux Operating System
Open the Linux command terminal, enter SDK root directory and execute the following command to compile the application:
./build.sh
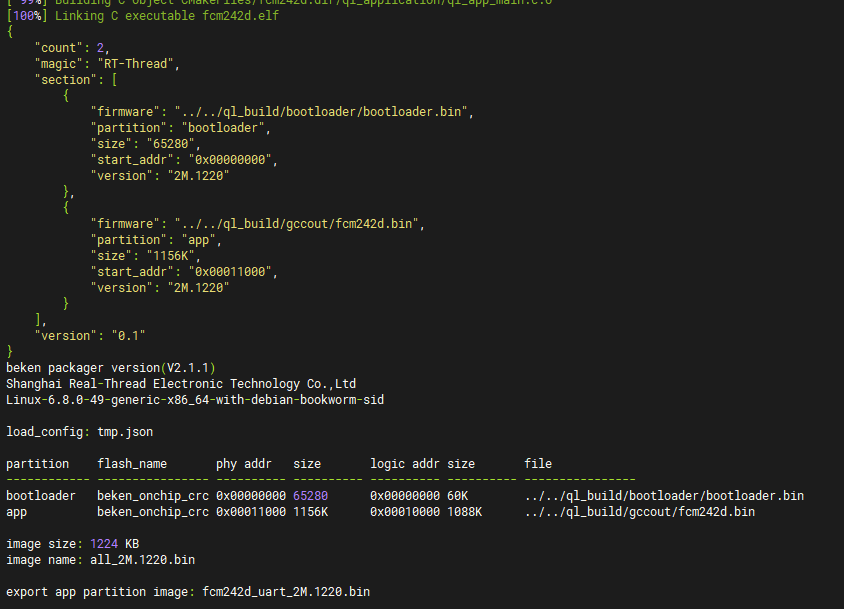
Upon successful compilation, the following interface will be displayed.
Windows Operating System
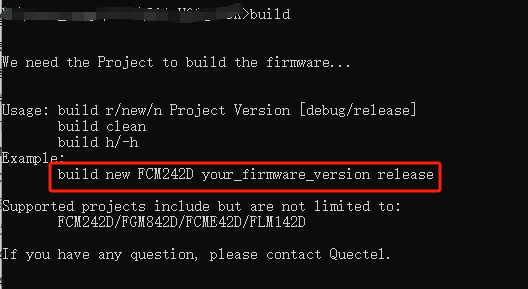
Open the Windows command terminal, enter SDK root directory and execute the following command to view compilation options:
build
After that, execute the corresponding compilation option to compile the application. For example, execute the following command to compile the program:
build new FCM242D your_firmware_version release
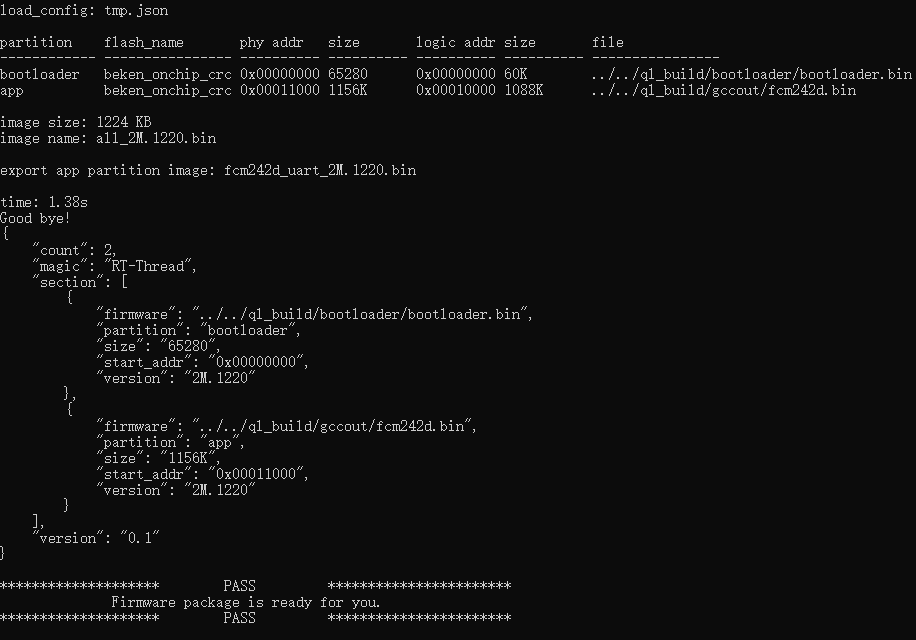
Upon successful compilation, the following interface will be displayed.
Compilation Result
The files generated after compilation are stored in the ql_out directory. The contents of the ql_out folder are as follows:
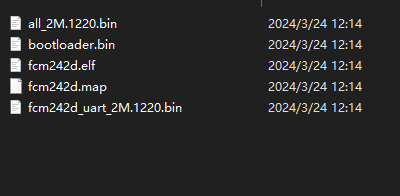
Files in the ql_out folder include:
- all_2M.1220.bin: Complete generated program firmware, which is flashed through the module's serial port.
- bootloader.bin: Bootloader file.
- fcm242d.elf: Executable object file generated in Linux.
- fcm242d.map: Program map file.
- fcm242d_uart_2M.1220.bin: Actual generated firmware (complete firmware except boot).
Clear Files Generated in Previous Compilations
The files generated in previous compilations are automatically cleared before a new compilation begins.
Firmware Flashing
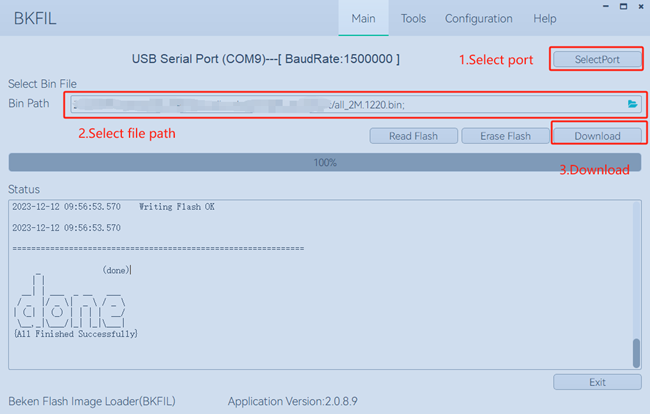
The module supports firmware flashing through the serial port using the BKFIL tool (contact Quectel Technical Support to obtain BKFIL tool and related usage information) as follows:
- Open BKFIL tool, then click
SelectPorton the main interface and choose the main port to flash the firmware. - Click the
 icon after Bin Path and choose the all_2M.1220.bin file.
icon after Bin Path and choose the all_2M.1220.bin file. - Click Download, then press reset button on the module to flash the firmware. After flashing, if "done" is displayed in the Status box, flashing is successful.
Common Compilation Errors on Linux
Error message: "arm-none-eabi-gcc: Command not found"
This error message indicates that the
gcc-arm-none-eabitoolchain is either not added to the environment variable or the toolchain is missing the required dependencies.To resolve this issue:
Ensure that the
gcc-arm-none-eabitoolchain is installed and properly added to the environment variable, see Chapter 3 for detailed steps.If the error message persists even after the toolchain is installed, it indicates that the required dependencies are missing. In this case, execute the following commands to install the missing required dependencies:
apt install libc6-i386 lsb-core apt-get install lib32z1 apt-get install lib32stdc++6 apt-get install libstdc++6
Error message: "arm-none-eabi-gcc: fatal error: -fuse-linker-plugin, but liblto_plugin.so not found"
This error message indicates that the liblto_plugin.so file is not found.
To resolve this issue:
- Rename the
liblto_plugin.so.0.0.0file toliblto_plugin.soin thetoolchain/gcc-arm-none-eabi-5_4-2016q3/lib/gcc/arm-none-eabi/5.4.1/directory.
- Rename the
Appendix References
| Abbreviation | Description |
|---|---|
| API | Application Programming Interface |
| ARM | Advanced RISC Machine |
| GCC | GNU Compiler Collection |
| IoT | Internet of Things |
| RTOS | Real-Time Operating System |
| SDK | Software Development Kit |