
AI视觉小车用户说明
购买链接
使用前组装说明
发货清单
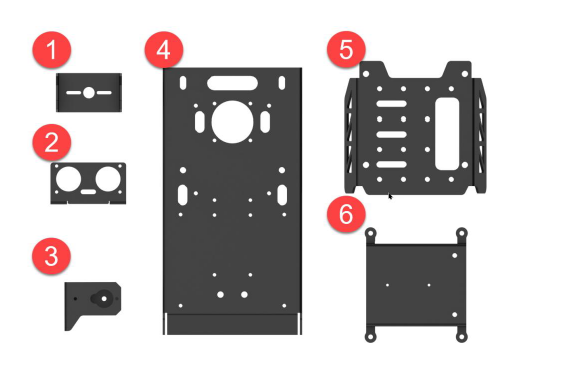
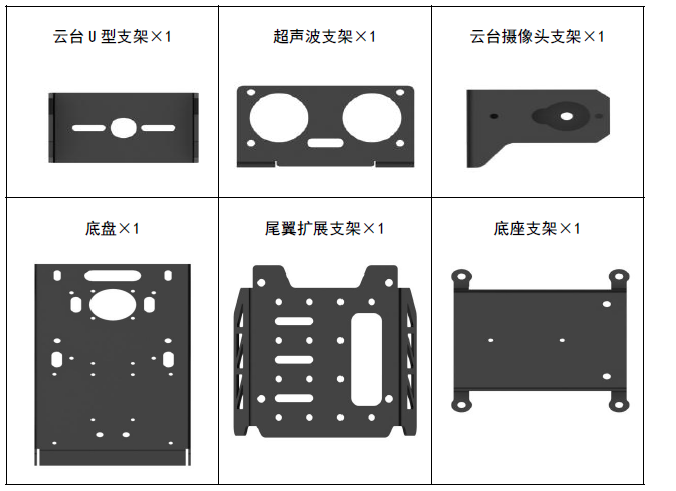
型材配件
螺丝配件

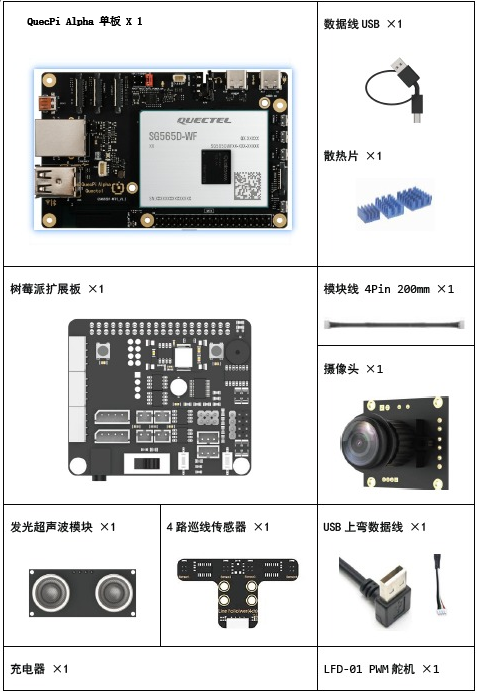
电子配件

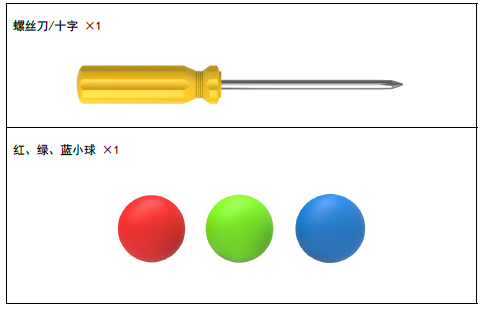
工具
组装步骤
用4 颗M2*5 圆头自攻螺丝,将发光超声波装至超声波支架上。
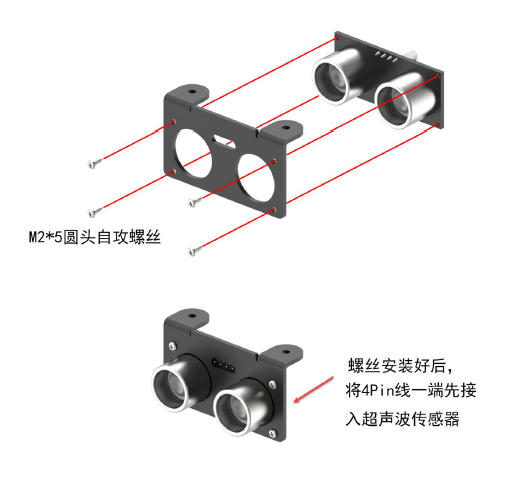
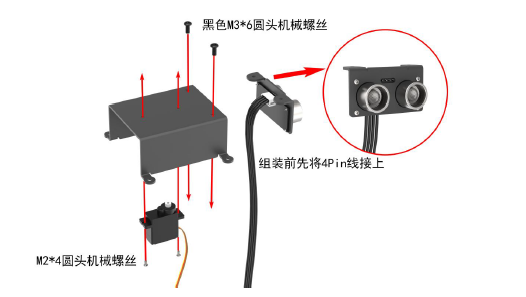
用2 颗M2*4 圆头机械螺丝,将PWM 舵机装在底座支架上;用2 颗黑色M3*6 圆头机械螺丝,将组装好的超声波支架装在底座支架上(组装前先把4pin 线装上)。
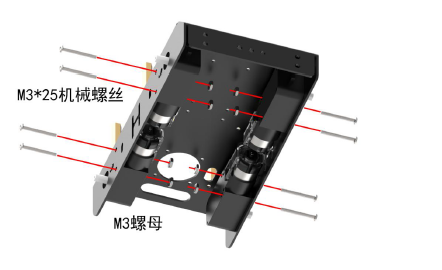
用8 颗M3*25 机械螺丝和8 颗M3 螺母,将四个TT马达固定在底盘上。
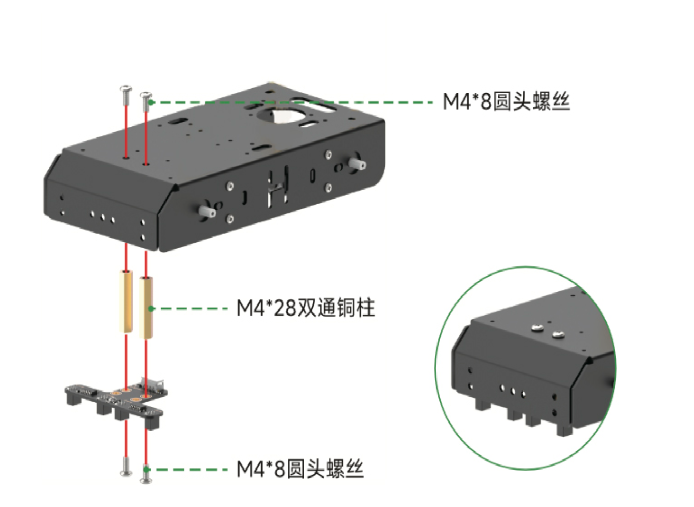
用2 颗M4*8 圆头机械螺丝和2 根M4*28 双通铜柱,固定在底盘上。再将四路巡线传感器用2 颗M4*8 圆头机械螺丝固定在底盘上。按照好四路巡线传感器之后,将4pin线一端插入传感器接口。
用4 颗黑色M3*6 圆头机械把组装好的底座支架安装在底盘上。

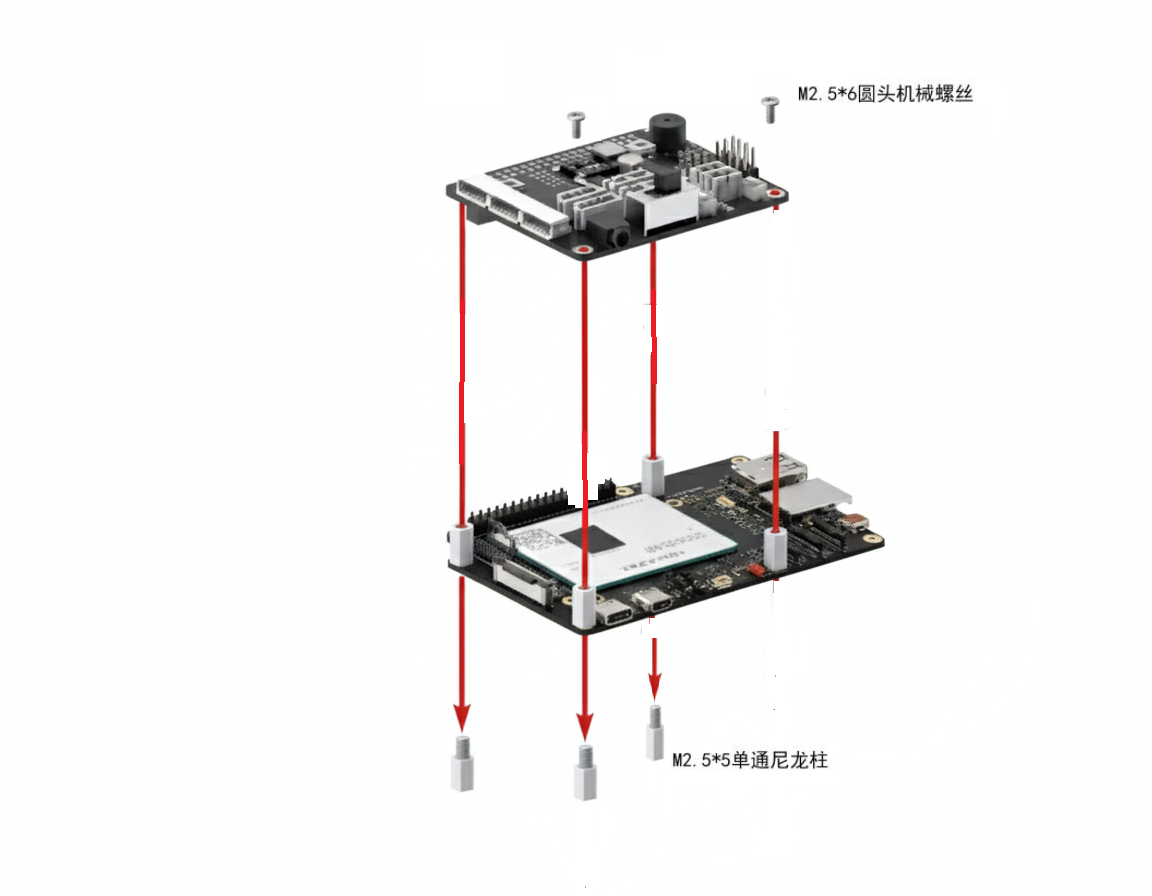
用3 颗M2.5*5 单通尼龙柱和3颗M2.5*10 双通尼龙柱把主板固定好。并将扩展板的排母,对准主板的排针(一一对齐)插入主板中。然后用2 颗M2.5*6圆头机械螺丝将扩展板和主板固定住。
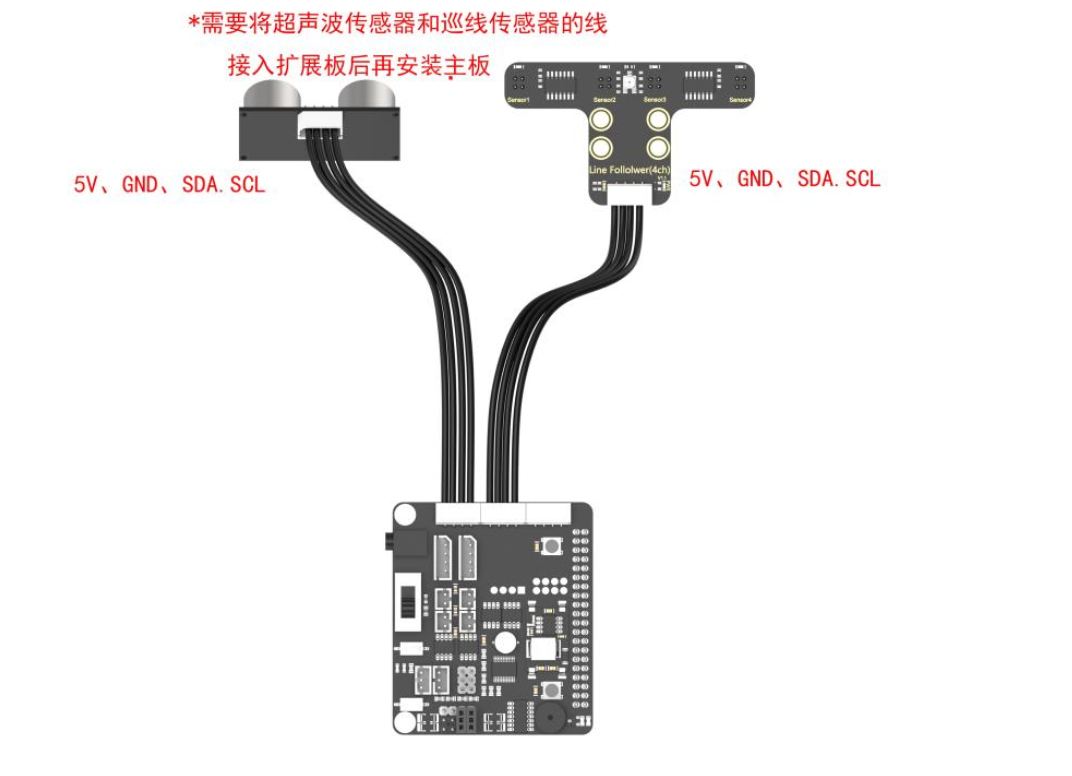
用4 颗M2.5*6 圆头机械螺丝把组装好的主板固定在底盘上,并将四路巡线传感器和发光超声波传感器接到扩展板对应接口上。
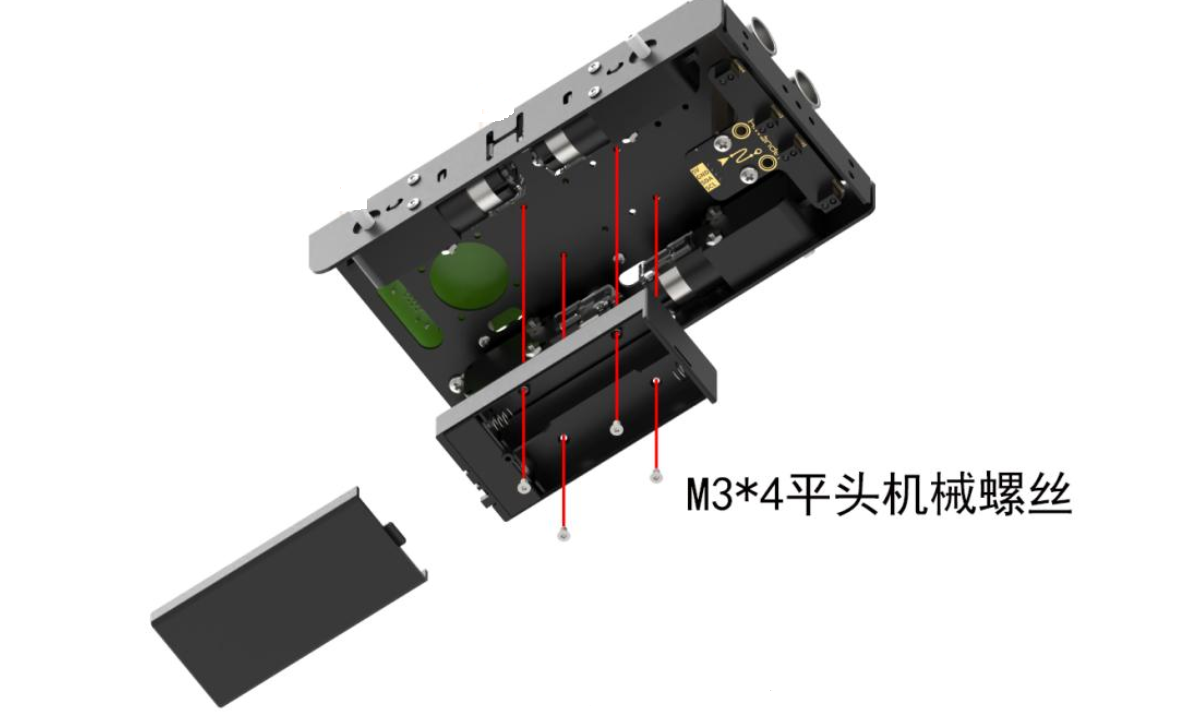
用4 颗M3*4 平头机械螺丝把电池盒固定在底盘下。
联轴器安装在TT 马达的轮轴上,并用4 颗盘头半机牙自攻/M2.3*25 把麦轮与TT 马达的轮轴固定住。

用2 颗M2*4 圆头自攻螺丝把塑料轴固定在云台U 型支架上,接着用1 颗M2*4圆头自攻螺丝把组装好的云台U 型支架安装在小车上。

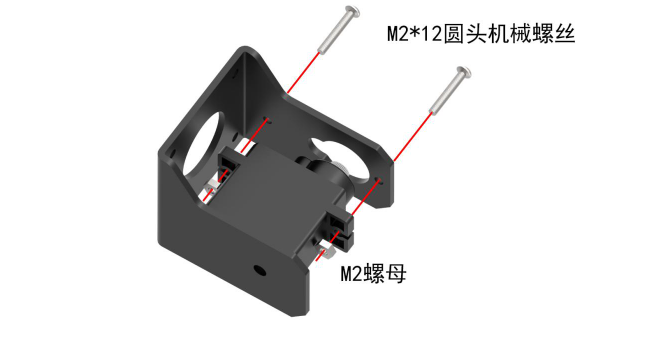
用2 颗M2*12 圆头机械螺丝和2 颗M2 螺母把PWM 舵机固定云台摄像头支架上。
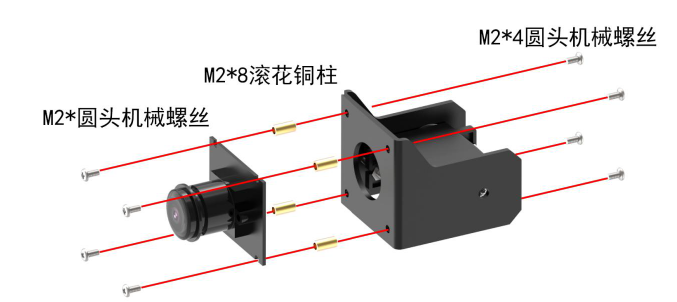
用4 颗M2*4 圆头机械螺丝和4 根M2*8 滚花铜柱固定在云台摄像头支架上。然后用2 颗M2*4 圆头机械螺丝将摄像头固定在云台摄像头支架上。
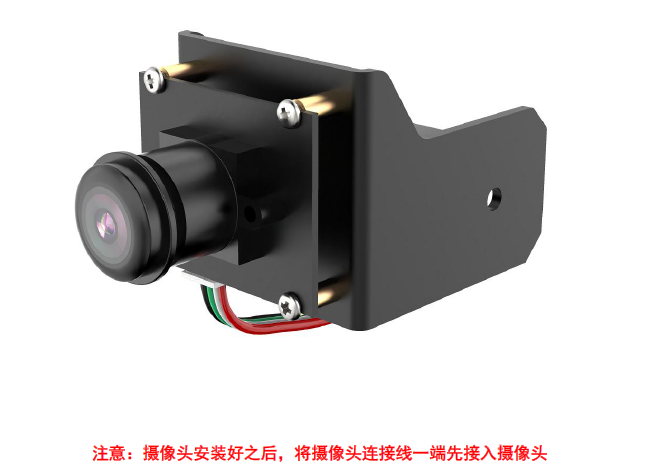
用1 颗M2*6 圆头自攻螺丝把组装好的云台摄像头支架固定在小车上。

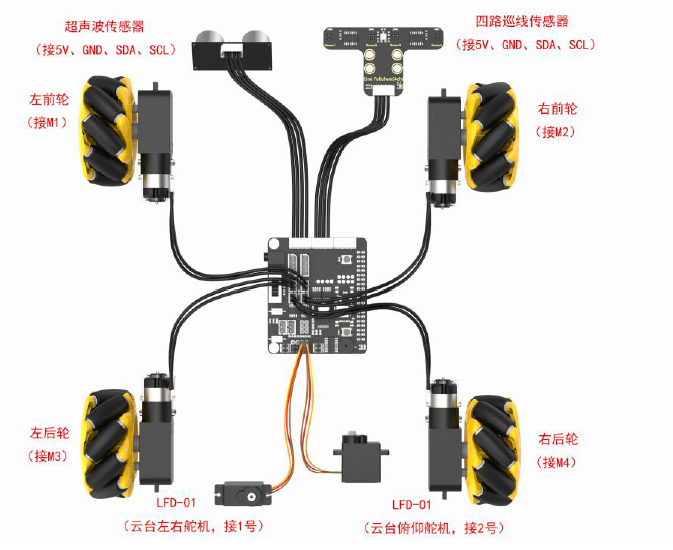
将4 个TT 马达接口和2 个云台舵机的接口(橙色接S(信号线)、红色接+、棕色接-)与扩展板进行连接。
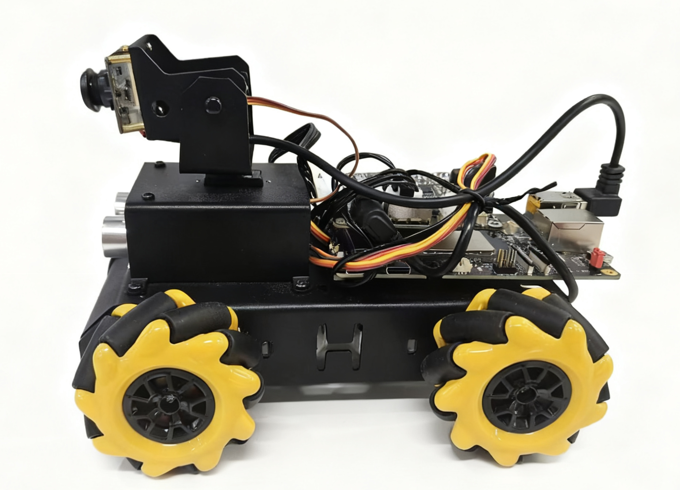
安装好后,车体如下。
使用前环境部署
下载环境
使用前需要下载相关环境,下载链接如下:
部署环境
下载好部署环境后,将部署环境通过adb push到设备中,再进行解压
#推送到设备
adb push ./quecpi_smartcar.zip /mnt
adb shell
#解压压缩包:
unzip /mnt/quecpi_smartcar.zip -d /mnt/
#为 run/ 目录下的所有文件和 deploy_container.sh 添加可执行权限:
chmod +x /mnt/quecpi_smartcar/service_config/run/*
chmod +x /mnt/quecpi_smartcar/deploy_container.sh
解压后得到以下的目录结构:
quecpi_smartcar/
├── docker_images/
│ └── docker_quecpi_smart_car.tar # Docker 镜像文件
├── ros2_ws/
│ ├── src/ # ROS2 源代码
│ └── software/ # 软件工具
├── service_config/
│ ├── rules.d/ # udev 规则文件
│ ├── service/ # systemd 服务文件
│ └── run/ # 开机快速启动脚本
└── deploy_container.sh # 完整部署脚本
确保通信
为保证QuecPi主板和扩展板能够通信上,需要使能40pin上的i2c9和uart12,使能方法如下:
在QuecPi主板上,先修改quecpi_config.ini配置文件,使用vi /etc/quecpi_config/quecpi_config.ini 修改成以下内容:
i2c9=enable spi10=disable uart12_2w=enable i2c13=disable spi14=disable heartbeat_color=green led_red_brightness=0 led_blue_brightness=0 led_green_brightness=0 heartbeat_switch=on输入quecpi_config 40pin set,之后重启QuecPi主板生效。
完整部署流程 (deploy_container.sh)
在以上重启之后,需要插上网线或者连接wifi,确保是在有网的环境下,之后去执行部署脚本。
# 运行完整部署
/mnt/quecpi_smartcar/deploy_container.sh
部署脚本执行成功后,如果部署成功,会弹出以下提示:
[SUCCESS] Deployment completed successfully!
ROS2 application has been automatically started!
使用前设备准备
电池充电
由于运输途中电池不能充满,所以在初次开机前,建议先给电池充满电,以下是具体充电方法:
- 拿出电池充电器,将两节18650 的电池(选配)按照正负极对应(正对正,负对
负)装到电池充电器中,注意!电池正负极切勿装反!再通过数据线将电池充电器(选配)
和充电头(5V 3A,需自备)进行连接,最后连接电源。

- 等待充电完成(适配器指示灯在未通电的状态下为绿色,通电后为红色代表充电中(充电时长约为5 个小时左右)、指示灯由红色变为绿色代表充电完成),充电完成后,请尽快拔掉充电器,切勿一直充电。
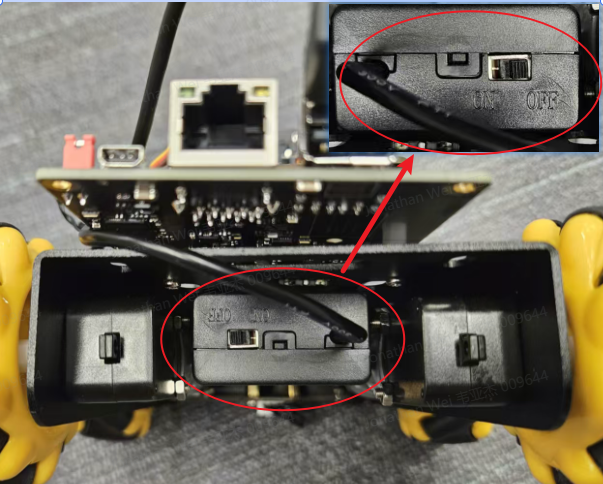
- 充电完成后,安装电池前请确保电池盒的开关拨到“OFF”档。(OFF档位置见开机章节)
手机APP安装
安卓系统:扫描以下二维码进行安装。

iOS 系统:可前往App Store 搜索“WonderPi”并进行下载安装。
开机准备
- 将两节有电18650的电池按照正负极对应装到小车底部的电池盒中,之后将底部的开关拨至“ON”。
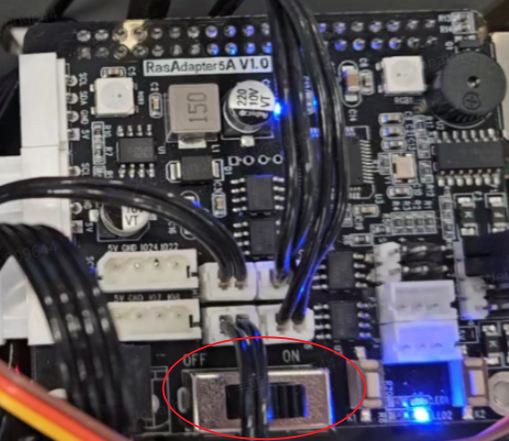
- 再将扩展板的开关由“OFF”推动到“ON”,此时扩展板的LED1、LED2 常亮,稍等片刻后LED1由常亮变为每隔1 秒闪亮一次、云台回到初始姿态、蜂鸣器发出“嘀”的一声,即设备成功开机。(大概需要等待30s后会听见“嘀”的一声)
注意:
- LED2为电源指示灯,通电时点亮,设备运行过程中是常亮的状态,若灯光变暗则表示电源没电了,需要充电;
- LED1 为通信指示灯,设备出厂默认的网络连接模式为直连模式,设备开机成功后LED1 每隔1S 闪烁一次;若将其设置为局域网模式,LED1则会常亮;
- 设备运行过程中,若LED1 与LED2 灯光变暗,并保持常亮的状态,则表示电源没电了,需要充电。
设备试玩
使用前连接
- 设备开机成功后,会进入AP 直连模式,并生成一个以“HW”开头的热点。在手机上打开手机APP“WonderPi”,依次点击“初级套件”、“TurboPi”。

- 点击界面右下角的“+”按钮,选择“直连模式”。

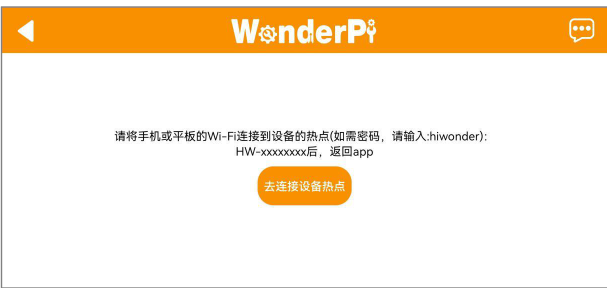
- 点击“去连接设备热点”按键,前往设置界面,连接以“HW”开头的热点,连接时需输入密码“hiwonder”。
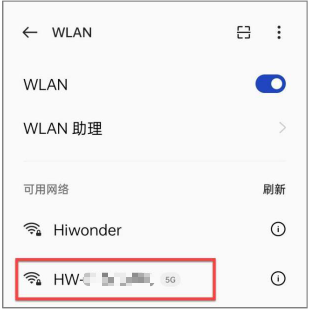
- 连接成功后返回手机APP,稍等片刻,当搜索到下图所示图标时,即为连接成功。(若设备列表下方未显示,可点击右上方的刷新,刷新设备)
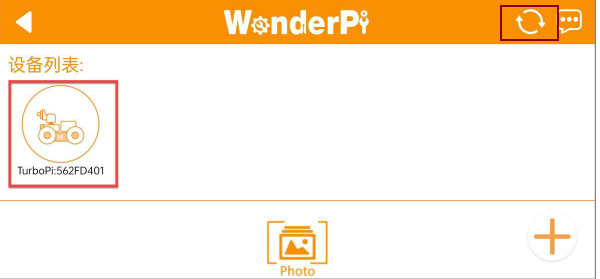
注意:若出现“网络不可用,是否继续连接”的提示弹窗,单击“保持连接”按键即可。
- 点击上图的TurboPi 图标即可进入玩法模式选择界面,如下所示

机体遥控
介绍:该玩法可以实时控制小车运动及超声波的RGB 灯;界面分为四个部分,各部分的描述以及功能图标如下所示:

① 状态栏:可以控制玩法的退出、回传画面的截图以及状态栏的隐藏;
② 控制栏:可以控制小车运动;(主要介绍控制栏功能)
③ 回传画面:显示摄像头的回传画面,并显示设备的电压值;
④ 超声波RGB 灯的调节:可以控制超声波模块的RGB 灯开启、关闭以及亮起不同颜色的灯。
操作步骤如下描述:
| 界面分布 | 图标 | 对应功能 |
|---|---|---|
 |
拖动中间的按钮,可控制TurboPi车体朝各个方向运动。 | |
 |
点击或长按此图标,可控制TurboPi车体原地逆时针转动。 | |
 |
点击或长按此图标,可控制TurboPi车体原地顺时针转动。 |
如需返回到玩法选择界面,点击左上方的返回箭头即可。
目标追踪
介绍:点击“目标追踪”,进入玩法界面。该玩法开启后可以实现小车随着目标颜色的移动而移动的功能。

操作步骤如下:
- 在以上画面中,点击①处按钮会从“取色”变为“确定取色”,在右边摄像头捕捉的画面中,挪动红色小圆点选中目标颜色,再点击“确定取色”确认颜色;
- 点击②处“云台追踪”按钮,可启动追踪玩法,此时设备的摄像头将跟随选定的颜色目标运动,车体不动;
- 若要实现车身跟随的玩法,需要同时选中②处“云台追踪”和③处“车身跟随”这两个按钮,此时设备的车体和云台会跟随选定的颜色目标运动。
注意:
- 请在光线充足的室内环境下进行,但尽量避免在强光直射下进行。
- 识别时,摄像头画面内请勿应无同目标颜色相同或相近的杂物,避免干扰识别。
取色巡线
介绍:点击“取色巡线”,进入玩法界面。启动该玩法后,可以让小车沿着黑线或红线前进。

操作步骤如下:
- 在以上画面中,点击①处按钮会从“取色”变为“确定取色”,在右边摄像头捕捉的画面中,挪动红色小圆点选中目标颜色,再点击“确定取色”确认颜色;
- 点击②处“开始”按钮,将沿着目标颜色的线条前进。
注意:
- 请在光线充足的室内环境下进行,但尽量避免在强光直射下进行。
- 识别时,摄像头画面内请勿应无同目标颜色相同或相近的杂物,避免干扰识别。
二维码识别
介绍:点击“二维码”识别,进入玩法界面。该玩法启动后可以让小车的摄像头识别不同的二维码,执行对应的动作。

① 界面左侧是二维码开关及选择区域;
② 界面右侧是二维码画面。
操作步骤如下:
点击“开始识别”按钮,并选择不同的二维码,将二维码放在设备的摄像头前方进行识别,设备将在识别到不同的二维码之后执行不同的动作。
| 按钮图标 | 功能说明 |
|---|---|
 |
小车执行前进动作的二维码 |
 |
小车执行后退动作的二维码 |
 |
小车执行左移动作的二维码 |
 |
小车执行右移动作的二维码 |
 |
显示选中的二维码信息 |
注意:
- 识别二维码时距离不宜太近或太远,一般二维码图片与摄像头相距为35cm为最佳。
- 请在光线充足的室内环境下进行,但尽量避免在强光直射下进行。
智能避障
点击“智能避障”,进入玩法界面。该玩法启动后可让小车通过超声波识别前方是否有障碍物并避开。

① 界面左侧避障玩法开关及障碍物阈值设置区域;
② 界面中间是摄像头回传画面区域;
③ 界面右侧是RGB彩灯和电机速度设置区域。
操作步骤如下:
点击“开始避障”按钮,设备将一直前进,检测到障碍物会左转直到没有障碍物,然后继续前进。
| 按钮图标 | 功能说明 |
|---|---|
 |
开启/关闭玩法。 |
 |
调节障碍物阈值,单位为cm。 |
 |
超声波RGB彩灯开启/关闭。 |
 |
超声波RGB灯光颜色调节。 |
 |
电机速度调节,数值越大,电机速度越快。 |
注意:请勿长时间近距离的检测物体