YOLOv8 开应用发
2025-12-05
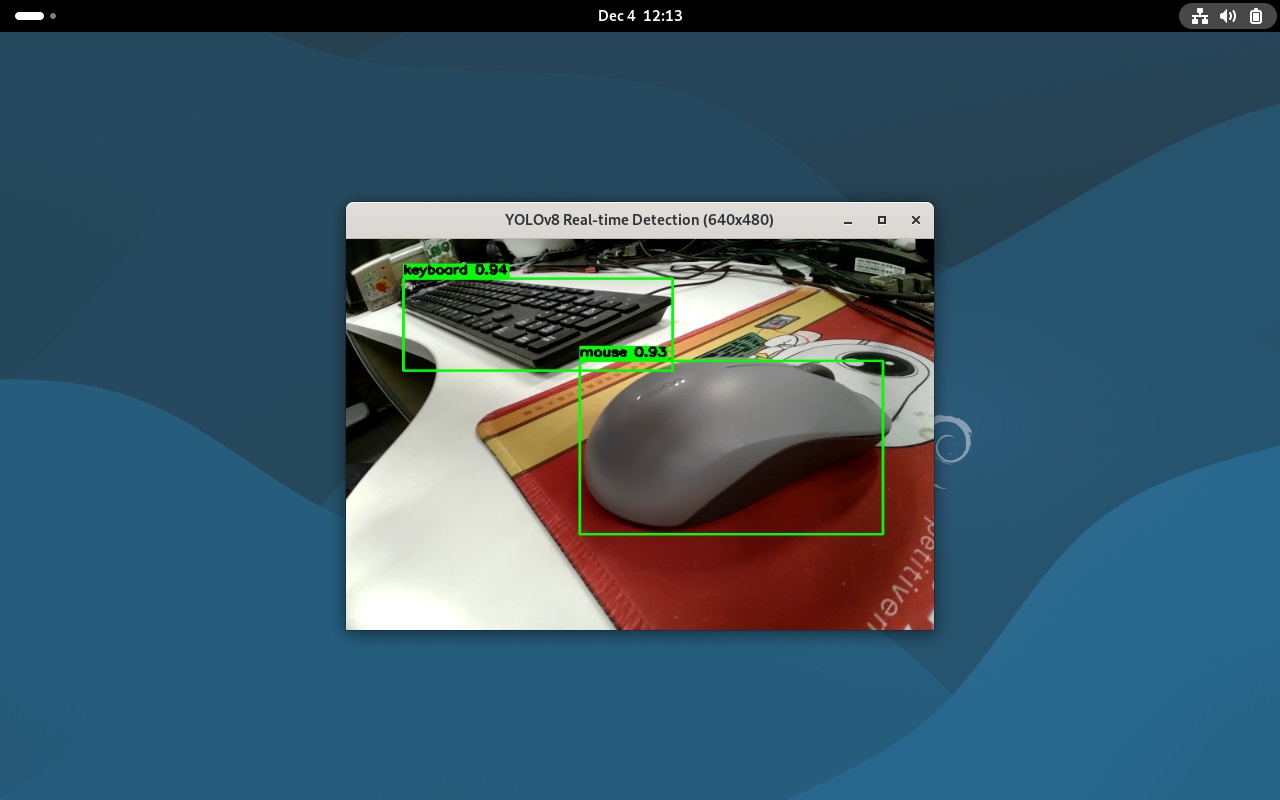
基于高通Quick AI Application Builder (QAI AppBuilder)工具、wxWidget库和YOLOv8模型,快速编写一个从摄像头取流,识别内容并显示到屏幕的app。
环境准备
sudo apt update -y
sudo apt install -y g++ make pkg-config wx3.2-headers libwxgtk3.2-dev
sudo apt install -y libopencv-core-dev libopencv-calib3d-dev libopencv-dnn-dev
sudo apt install -y libopencv-objdetect-dev libopencv-photo-dev libopencv-stitching-dev
sudo apt install -y libopencv-video-dev libgstreamer-plugins-base1.0-dev
下载QAI AppBuilder工具并解压到用户目录
# 点击上面的连接下载压缩包ai-engine-direct-helper.tar,放置在~/ai-engine-direct-helper.tar
# 解压
cd ~
tar -xvf ai-engine-direct-helper.tar
编辑ai-engine-direct-helper/src/LibAppBuilder.cpp,将其中的空main函数移除,后面编译时会用到这个源文件,但是不需要这里的main函数。
下载QAIRT工具并解压到用户目录
# 点击上面的连接下载压缩包v2.37.1.250807.zip,放置在~/v2.37.1.250807.zip
# 解压
cd ~
tar -xvf v2.37.1.250807.zip
编写代码
创建main.cpp文件,内容如下:
#include <iostream>
#include <filesystem>
#include <string>
#include <vector>
#include <cstddef>
#include <opencv2/opencv.hpp>
#include <opencv2/core/utils/logger.hpp>
#include <algorithm>
#include <map>
#include <thread>
#include <wx/rawbmp.h>
#include <gst/video/video-info.h>
#include <wx/log.h>
#include <wx/wx.h>
#include <gst/gst.h>
#include <gst/app/gstappsink.h>
#include <wx/dcclient.h>
#include <wx/thread.h>
#include <chrono>
#include <atomic>
namespace fs = std::filesystem;
const std::string MODEL_NAME = "yolov8_det";
const int IMAGE_SIZE = 640;
unsigned long frameCounter = 0;
// Class mapping for YOLOv8
std::map<int, std::string> class_map = {
{0, "person"},
{1, "bicycle"},
{2, "car"},
{3, "motorcycle"},
{4, "airplane"},
{5, "bus"},
{6, "train"},
{7, "truck"},
{8, "boat"},
{9, "traffic light"},
{10, "fire hydrant"},
{11, "stop sign"},
{12, "parking meter"},
{13, "bench"},
{14, "bird"},
{15, "cat"},
{16, "dog"},
{17, "horse"},
{18, "sheep"},
{19, "cow"},
{20, "elephant"},
{21, "bear"},
{22, "zebra"},
{23, "giraffe"},
{24, "backpack"},
{25, "umbrella"},
{26, "handbag"},
{27, "tie"},
{28, "suitcase"},
{29, "frisbee"},
{30, "skis"},
{31, "snowboard"},
{32, "sports ball"},
{33, "kite"},
{34, "baseball bat"},
{35, "baseball glove"},
{36, "skateboard"},
{37, "surfboard"},
{38, "tennis racket"},
{39, "bottle"},
{40, "wine glass"},
{41, "cup"},
{42, "fork"},
{43, "knife"},
{44, "spoon"},
{45, "bowl"},
{46, "banana"},
{47, "apple"},
{48, "sandwich"},
{49, "orange"},
{50, "broccoli"},
{51, "carrot"},
{52, "hot dog"},
{53, "pizza"},
{54, "donut"},
{55, "cake"},
{56, "chair"},
{57, "couch"},
{58, "potted plant"},
{59, "bed"},
{60, "dining table"},
{61, "toilet"},
{62, "tv"},
{63, "laptop"},
{64, "mouse"},
{65, "remote"},
{66, "keyboard"},
{67, "cell phone"},
{68, "microwave"},
{69, "oven"},
{70, "toaster"},
{71, "sink"},
{72, "refrigerator"},
{73, "book"},
{74, "clock"},
{75, "vase"},
{76, "scissors"},
{77, "teddy bear"},
{78, "hair drier"},
{79, "toothbrush"}
};
struct Detection {
float x1, y1, x2, y2;
float score;
int class_id;
};
float calculateIoU(const Detection& box1, const Detection& box2) {
float inter_x1 = std::max(box1.x1, box2.x1);
float inter_y1 = std::max(box1.y1, box2.y1);
float inter_x2 = std::min(box1.x2, box2.x2);
float inter_y2 = std::min(box1.y2, box2.y2);
float inter_area = std::max(0.0f, inter_x2 - inter_x1) * std::max(0.0f, inter_y2 - inter_y1);
float box1_area = (box1.x2 - box1.x1) * (box1.y2 - box1.y1);
float box2_area = (box2.x2 - box2.x1) * (box2.y2 - box2.y1);
return inter_area / (box1_area + box2_area - inter_area);
}
std::vector<Detection> nonMaximumSuppression(const std::vector<Detection>& detections,
float score_threshold = 0.45,
float iou_threshold = 0.7) {
std::vector<Detection> filtered_detections;
std::vector<Detection> candidates;
// Filter by score threshold
for (const auto& det : detections) {
if (det.score >= score_threshold) {
candidates.push_back(det);
}
}
// Sort by score in descending order
std::sort(candidates.begin(), candidates.end(),
[](const Detection& a, const Detection& b) { return a.score > b.score; });
// NMS
while (!candidates.empty()) {
// Take the highest scoring detection
Detection best_det = candidates[0];
filtered_detections.push_back(best_det);
candidates.erase(candidates.begin());
// Remove overlapping detections
for (auto it = candidates.begin(); it != candidates.end();) {
if (calculateIoU(best_det, *it) > iou_threshold) {
it = candidates.erase(it);
} else {
++it;
}
}
}
return filtered_detections;
}
void drawBoxOnImage(cv::Mat& image, const Detection& det,
float scale_x = 1.0f, float scale_y = 1.0f) {
// Scale coordinates back to original image size
int x1 = static_cast<int>(det.x1 * scale_x);
int y1 = static_cast<int>(det.y1 * scale_y);
int x2 = static_cast<int>(det.x2 * scale_x);
int y2 = static_cast<int>(det.y2 * scale_y);
// Clamp coordinates to image boundaries
x1 = std::max(0, std::min(image.cols - 1, x1));
y1 = std::max(0, std::min(image.rows - 1, y1));
x2 = std::max(0, std::min(image.cols - 1, x2));
y2 = std::max(0, std::min(image.rows - 1, y2));
if (x1 >= x2 || y1 >= y2) return; // Skip invalid boxes
// Draw rectangle (BGR color: green)
cv::rectangle(image, cv::Point(x1, y1), cv::Point(x2, y2), cv::Scalar(0, 255, 0), 2);
// Create label text
std::string label = class_map[det.class_id] + " " + std::to_string(det.score).substr(0, 4);
// Draw label background
int baseline = 0;
cv::Size text_size = cv::getTextSize(label, cv::FONT_HERSHEY_SIMPLEX, 0.5, 2, &baseline);
cv::rectangle(image, cv::Point(x1, y1 - text_size.height - baseline),
cv::Point(x1 + text_size.width, y1), cv::Scalar(0, 255, 0), cv::FILLED);
// Draw label text
cv::putText(image, label, cv::Point(x1, y1 - baseline),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0), 2);
}
class YOLOv8Detector {
private:
LibAppBuilder libAppBuilder;
bool initialized = false;
public:
YOLOv8Detector() = default;
~YOLOv8Detector() {
if (initialized) {
libAppBuilder.ModelDestroy(MODEL_NAME);
}
}
bool Initialize() {
// Get current working directory
fs::path execution_ws = fs::current_path();
fs::path backend_lib_path = execution_ws / "libQnnHtp.so";
fs::path system_lib_path = execution_ws / "libQnnSystem.so";
fs::path model_path = execution_ws / (MODEL_NAME + ".bin");
// Disable OpenCV logging
cv::utils::logging::setLogLevel(cv::utils::logging::LOG_LEVEL_ERROR);
SetLogLevel(1);
SetProfilingLevel(1); // ProfilingLevel::BASIC
std::cout << "Initializing YOLOv8 model..." << std::endl;
int ret = libAppBuilder.ModelInitialize(MODEL_NAME, model_path.string(),
backend_lib_path.string(), system_lib_path.string());
if (ret < 0) {
std::cout << "Failed to initialize YOLOv8 model" << std::endl;
return false;
}
initialized = true;
std::cout << "YOLOv8 model initialized successfully" << std::endl;
return true;
}
std::vector<Detection> Detect(cv::Mat& image) {
if (!initialized) return {};
frameCounter++;
// Save original dimensions for scaling
int orig_height = image.rows;
int orig_width = image.cols;
float scale_x = static_cast<float>(orig_width) / IMAGE_SIZE;
float scale_y = static_cast<float>(orig_height) / IMAGE_SIZE;
// Resize image to model input size
cv::Mat resized_image;
cv::resize(image, resized_image, cv::Size(IMAGE_SIZE, IMAGE_SIZE),
0, 0, cv::INTER_LINEAR);
// Convert BGR to RGB and normalize to [0, 1]
cv::Mat rgb_image;
cv::cvtColor(resized_image, rgb_image, cv::COLOR_BGR2RGB);
cv::Mat float_image;
rgb_image.convertTo(float_image, CV_32FC3, 1.0 / 255.0);
// Prepare input tensor (NHWC format)
std::vector<float> input_data(IMAGE_SIZE * IMAGE_SIZE * 3);
memcpy(input_data.data(), float_image.data, input_data.size() * sizeof(float));
// Set performance profile
SetPerfProfileGlobal("burst");
// Prepare input/output buffers
std::vector<uint8_t*> inputBuffers;
std::vector<uint8_t*> outputBuffers;
std::vector<size_t> outputSize;
inputBuffers.push_back(reinterpret_cast<uint8_t*>(input_data.data()));
// Perform inference
std::string perfProfile = "burst";
int ret = libAppBuilder.ModelInference(MODEL_NAME, inputBuffers, outputBuffers,
outputSize, perfProfile);
// Release performance profile
RelPerfProfileGlobal();
if (ret < 0) {
std::cout << "Inference failed" << std::endl;
return {};
}
// Parse output tensors
if (outputBuffers.size() < 3) {
std::cout << "Unexpected number of output buffers: " << outputBuffers.size() << std::endl;
return {};
}
// Get output data
float* scores_data = reinterpret_cast<float*>(outputBuffers[0]);
float* class_ids_data = reinterpret_cast<float*>(outputBuffers[1]);
float* boxes_data = reinterpret_cast<float*>(outputBuffers[2]);
// Assuming output shape is [1, 8400, ...]
const int num_predictions = 8400;
// Collect all detections
std::vector<Detection> all_detections;
for (int i = 0; i < num_predictions; i++) {
Detection det;
det.score = scores_data[i];
det.class_id = static_cast<int>(class_ids_data[i]);
// Box coordinates: [x1, y1, x2, y2]
det.x1 = boxes_data[i * 4];
det.y1 = boxes_data[i * 4 + 1];
det.x2 = boxes_data[i * 4 + 2];
det.y2 = boxes_data[i * 4 + 3];
// Scale back to original image coordinates
det.x1 *= scale_x;
det.y1 *= scale_y;
det.x2 *= scale_x;
det.y2 *= scale_y;
all_detections.push_back(det);
}
// Apply NMS
std::vector<Detection> filtered_detections = nonMaximumSuppression(all_detections);
// Free output buffers
for (auto buffer : outputBuffers) {
free(buffer);
}
return filtered_detections;
}
};
class CameraFrame : public wxFrame
{
public:
CameraFrame(const wxString& title);
~CameraFrame();
private:
wxMutex m_imageMutex;
wxImage m_frameImage;
GstElement *m_pipeline = nullptr;
GstElement *m_appsink = nullptr;
YOLOv8Detector m_detector;
bool InitGstPipeline();
static GstFlowReturn NewSampleCallback(GstAppSink *sink, gpointer user_data);
void ConvertGstBufferToWxImage(GstBuffer *buffer, GstCaps *caps);
void OnPaint(wxPaintEvent& event);
void OnClose(wxCloseEvent& event);
DECLARE_EVENT_TABLE()
};
class CameraApp : public wxApp
{
public:
virtual bool OnInit();
};
IMPLEMENT_APP(CameraApp)
BEGIN_EVENT_TABLE(CameraFrame, wxFrame)
EVT_PAINT(CameraFrame::OnPaint)
EVT_CLOSE(CameraFrame::OnClose)
END_EVENT_TABLE()
bool CameraApp::OnInit()
{
gst_init(nullptr, nullptr);
CameraFrame *frame = new CameraFrame(wxT("YOLOv8 Real-time Detection (640x480)"));
frame->Show(true);
return true;
}
CameraFrame::CameraFrame(const wxString& title)
: wxFrame(nullptr, wxID_ANY, title, wxDefaultPosition, wxSize(640, 480))
{
// Initialize detector
if (!m_detector.Initialize()) {
wxLogError("Failed to initialize YOLOv8 detector");
Close();
return;
}
// Initialize pipeline and start
if (InitGstPipeline()) {
gst_element_set_state(m_pipeline, GST_STATE_PLAYING);
//wxLogMessage("GStreamer pipeline started successfully");
} else {
wxLogError("Failed to init GStreamer pipeline");
Close();
}
}
CameraFrame::~CameraFrame()
{
if (m_pipeline) {
gst_element_set_state(m_pipeline, GST_STATE_NULL);
gst_object_unref(m_pipeline);
}
gst_deinit();
}
static void OnBusError(GstBus* bus, GstMessage* msg, gpointer data)
{
GError* err = nullptr;
gchar* debug_info = nullptr;
gst_message_parse_error(msg, &err, &debug_info);
wxLogError("GStreamer error: %s", err ? err->message : "Unknown error");
g_error_free(err);
g_free(debug_info);
}
bool CameraFrame::InitGstPipeline()
{
const gchar *pipelineDesc = "qtiqmmfsrc name=camsrc ! "
"video/x-raw,format=NV12,width=640,height=480,framerate=30/1 ! "
"videoconvert ! "
"video/x-raw,format=BGR ! "
"appsink name=appsink sync=false max-buffers=1 drop=true";
// Create pipeline
m_pipeline = gst_parse_launch(pipelineDesc, nullptr);
if (!m_pipeline) return false;
GstBus* bus = gst_pipeline_get_bus(GST_PIPELINE(m_pipeline));
gst_bus_add_signal_watch(bus);
g_signal_connect(bus, "message::error", G_CALLBACK(OnBusError), this);
gst_object_unref(bus);
// Get appsink element
m_appsink = gst_bin_get_by_name(GST_BIN(m_pipeline), "appsink");
if (!m_appsink) return false;
// Configure appsink
gst_app_sink_set_emit_signals(GST_APP_SINK(m_appsink), TRUE);
gst_app_sink_set_drop(GST_APP_SINK(m_appsink), TRUE);
gst_app_sink_set_max_buffers(GST_APP_SINK(m_appsink), 1);
GstAppSinkCallbacks callbacks = {nullptr, nullptr, NewSampleCallback, nullptr, nullptr, nullptr};
gst_app_sink_set_callbacks(GST_APP_SINK(m_appsink), &callbacks, this, nullptr);
return true;
}
GstFlowReturn CameraFrame::NewSampleCallback(GstAppSink *sink, gpointer user_data)
{
CameraFrame *frame = static_cast<CameraFrame*>(user_data);
GstSample *sample = gst_app_sink_pull_sample(sink);
if (!sample) return GST_FLOW_ERROR;
GstBuffer *buffer = gst_sample_get_buffer(sample);
GstCaps *caps = gst_sample_get_caps(sample);
if (buffer && caps) {
frame->ConvertGstBufferToWxImage(buffer, caps);
frame->Refresh();
}
gst_sample_unref(sample);
return GST_FLOW_OK;
}
void CameraFrame::ConvertGstBufferToWxImage(GstBuffer *buffer, GstCaps *caps)
{
GstVideoInfo info;
if (!gst_video_info_from_caps(&info, caps)) {
wxLogWarning("Failed to get video info from caps");
return;
}
// Validate video dimensions
if (info.width <= 0 || info.height <= 0) {
wxLogWarning("Invalid video dimensions: %dx%d", info.width, info.height);
return;
}
GstMapInfo map;
if (!gst_buffer_map(buffer, &map, GST_MAP_READ)) {
wxLogWarning("Failed to map GST buffer");
return;
}
// Validate data size (RGB format should be width×height×3)
size_t expectedSize = info.width * info.height * 3;
if (map.size < expectedSize) {
wxLogWarning("Buffer size mismatch: expected %zu, got %zu", expectedSize, map.size);
gst_buffer_unmap(buffer, &map);
return;
}
// Convert GST buffer to cv::Mat for detection
cv::Mat frame(info.height, info.width, CV_8UC3, map.data);
// Perform detection
auto detections = m_detector.Detect(frame);
// Draw detections on frame
for (const auto& det : detections) {
drawBoxOnImage(frame, det);
}
// Convert BGR to RGB for wxImage
cv::cvtColor(frame, frame, cv::COLOR_BGR2RGB);
wxMutexLocker locker(m_imageMutex);
m_frameImage = wxImage(info.width, info.height, frame.data, true).Copy();
gst_buffer_unmap(buffer, &map);
}
void CameraFrame::OnPaint(wxPaintEvent& event)
{
wxPaintDC dc(this);
wxMutexLocker locker(m_imageMutex);
if (!m_frameImage.IsOk() || m_frameImage.GetWidth() <= 0 || m_frameImage.GetHeight() <= 0) {
// Draw default background
dc.SetBackground(wxBrush(wxColour(50, 50, 50)));
dc.Clear();
// Draw status text
dc.SetTextForeground(wxColour(255, 255, 255));
dc.DrawText(wxT("Waiting for camera feed..."), wxPoint(20, 20));
return;
}
// Draw image, scaled to window size
wxSize clientSize = GetClientSize();
if (clientSize.GetWidth() <= 0 || clientSize.GetHeight() <= 0)
return;
wxBitmap bmp(m_frameImage.Scale(clientSize.GetWidth(), clientSize.GetHeight(), wxIMAGE_QUALITY_BILINEAR));
dc.DrawBitmap(bmp, 0, 0, false);
}
void CameraFrame::OnClose(wxCloseEvent& event)
{
Destroy();
}
创建Makefile
创建一个Makefile文件,内容如下:
SRCS += main.cpp
SRCS += $(wildcard /home/pi/ai-engine-direct-helper/src/*.cpp)
SRCS += $(wildcard /home/pi/ai-engine-direct-helper/src/Log/*.cpp)
SRCS += $(wildcard /home/pi/ai-engine-direct-helper/src/PAL/src/linux/*.cpp)
SRCS += $(wildcard /home/pi/ai-engine-direct-helper/src/Utils/*.cpp)
SRCS += $(wildcard /home/pi/ai-engine-direct-helper/src/WrapperUtils/*.cpp)
SRCS += $(wildcard /home/pi/ai-engine-direct-helper/src/PAL/src/common/*.cpp)
OBJS = $(patsubst %cpp, %o, $(SRCS))
DEPS = $(patsubst %cpp, %d, $(SRCS))
CXXFLAGS += -I/usr/include/opencv4
CXXFLAGS += -I/usr/include/wx-3.2
CXXFLAGS += -I/home/pi/qairt/2.37.1.250807/include/QNN
CXXFLAGS += -I/home/pi/ai-engine-direct-helper/src
CXXFLAGS += -I/home/pi/ai-engine-direct-helper/src/Utils
CXXFLAGS += -I/home/pi/ai-engine-direct-helper/src/WrapperUtils
CXXFLAGS += -I/home/pi/ai-engine-direct-helper/src/Log
CXXFLAGS += -I/home/pi/ai-engine-direct-helper/src/PAL/include
CXXFLAGS += -I/usr/include/torch/csrc/api/include
LDFLAGS += -lopencv_core -lopencv_highgui -lopencv_imgcodecs -lopencv_imgproc -lopencv_videoio
CXXFLAGS += `wx-config --cxxflags` `pkg-config --cflags gstreamer-1.0 gstreamer-app-1.0 gstreamer-video-1.0` -Wall -g
LDFLAGS += `wx-config --libs` `pkg-config --libs gstreamer-1.0 gstreamer-app-1.0 gstreamer-video-1.0`
TARGET = wx_yolo8
all: $(TARGET)
%.o: %.cpp
g++ -c -g -MMD $(CXXFLAGS) $< -o $@
$(TARGET): ${OBJS}
g++ -o $@ $^ ${LDFLAGS}
sinclude $(DEPS)
.PHONY: clean
clean:
$(RM) $(TARGET) ${OBJS} ${DEPS}
编译程序
执行命令 make 编译程序,获得可执行程序文件wx_yolo8。
下载模型文件
下载模型文件yolov8_det.bin
下载运行时库文件
libQnnHtp.so
libQnnHtpV68Skel.so
libQnnHtpV68Stub.so
libQnnSystem.so
运行程序
执行下列命令
FILE_PATH=$(sudo find /run/user/1001 -type f -name '.mutter-*' | head -n 1)
sudo XAUTHORITY="$FILE_PATH" \
LD_LIBRARY_PATH=lib:$LD_LIBRARY_PATH \
GST_PLUGIN_PATH=/usr/lib/gstreamer-1.0:$GST_PLUGIN_PATH \
DISPLAY=:0 ./wx_yolo8
运行效果